I think I need SPI connection. It seems like this encoder is now supported.
I checked the pin connections twice.
Rev | Odrive
V | 3.3
Miso| Miso
Sel | Pin 8
Mosi | Mosi
CLK | SCK
GND | GND
(I’m not sure what SEL means on the REV.)
dump_errors(odrv0)
system: no error
axis0
axis: no error
motor: Error(s):
MOTOR_ERROR_DRV_FAULT
sensorless_estimator: no error
encoder: Error(s):
ENCODER_ERROR_ABS_SPI_COM_FAIL
controller: no error
axis1
axis: no error
motor: Error(s):
MOTOR_ERROR_DRV_FAULT
sensorless_estimator: no error
encoder: no error
controller: no error
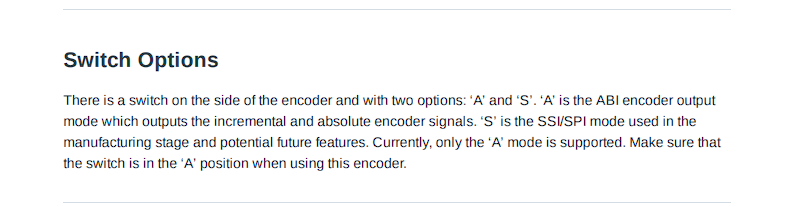
I think we need switch option S but not sure. I also tried both
I don’t need to do anything but power it up for the error to show. If I unplug the encoder, the errors go away and I can go back to using axis1 that is still setup properly. Once I plug the encoder back in, i get the error again. If I clear errors then the error is still there. I was unable to search for advice.
Paul: I know it has PWM out. If it also has SPI then the odrive needs to be in ABS_AEAT mode Sage: so I would do
odrv0.axis0.encoder.config.mode = ENCODER_MODE_SPI_ABS_AEAT
is this correct Paul: Correct. then save and reboot I think
plugging in the encoder seems to give a MOTOR_ERROR_DRV_FAULT sometimes and can be turned off by unplugging the encoder
In [17]: odrv0.erase_configuration()
Oh no odrv0 disappeared
Reconnected to ODrive 206235A55748 as odrv0
In [18]: dump_errors(odrv0)
system: no error
axis0
axis: no error
motor: Error(s):
MOTOR_ERROR_DRV_FAULT
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: no error
motor: Error(s):
MOTOR_ERROR_DRV_FAULT
sensorless_estimator: no error
encoder: no error
controller: no error
In [19]: dump_errors(odrv0)
system: no error
axis0
axis: no error
motor: Error(s):
MOTOR_ERROR_DRV_FAULT
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: no error
motor: Error(s):
MOTOR_ERROR_DRV_FAULT
sensorless_estimator: no error
encoder: no error
controller: no error
I removed and plugged the encoder back in
In [20]: odrv0.clear_errors()
In [21]: dump_errors(odrv0)
system: no error
axis0
axis: no error
motor: no error
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: no error
motor: no error
sensorless_estimator: no error
encoder: no error
controller: no error
In [22]: odrv0.config.enable_brake_resistor = True
...: odrv0.config.dc_max_negative_current = -1
...: odrv0.axis0.encoder.config.abs_spi_cs_gpio_pin = 8
...: odrv0.axis0.encoder.config.mode = ENCODER_MODE_SPI_ABS_AEAT
...: odrv0.axis0.encoder.config.cpr = 8192
In [23]: odrv0.save_configuration()
Oh no odrv0 disappeared
Reconnected to ODrive 206235A55748 as odrv0
In [24]: dump_errors(odrv0)
system: no error
axis0
axis: no error
motor: Error(s):
MOTOR_ERROR_DRV_FAULT
sensorless_estimator: no error
encoder: Error(s):
ENCODER_ERROR_UNSUPPORTED_ENCODER_MODE
ENCODER_ERROR_ABS_SPI_COM_FAIL
controller: no error
axis1
axis: no error
motor: Error(s):
MOTOR_ERROR_DRV_FAULT
sensorless_estimator: no error
encoder: no error
controller: no error
In [25]:
It might only support PWM or incremental mode, though.
I doubt anyone has used this encoder in absolute mode with ODrive, despite the “Guide” (perhaps someone indicated it would be compatible due to the AEAT encoder built-in?)
As mentioned on discord, the AS5047P, the AS5048A, and the RLS Orbis encoders I know function. The CUI AMT23 series work, but not very well (due to some bug in the AMT23 encoder PCB)