Hi guys,
I’m using the Odrive pro to control a 3000 W motor. Hence, there’s a lot of EMI. I’ll purchase a ferrite ring to help my case. However, I also want to implement CAN communication between my Arduino and the Odrive using a CAN shell to have a more reliable connection. However, I’ve read the doc and other threads, but I can’t find anything to help me on the “CMD ID”. I understand the process for the can_id process with the bitshifting and everything.
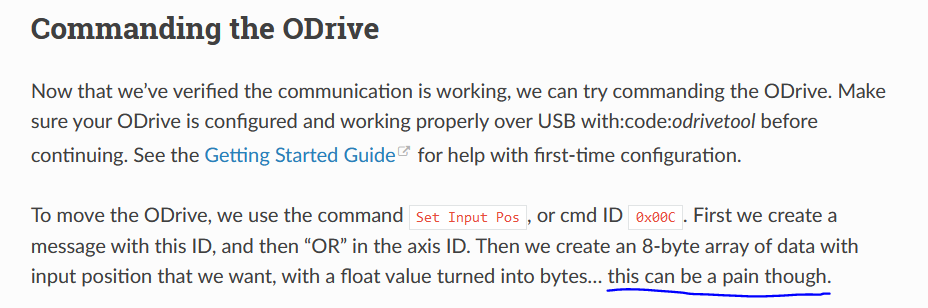
But for the command ID, I can’t figure how to write it, here’s an example :


To set the input_pos, I simply use the cmd ID to 0x00C, I don’t need the fourth or fifth column of the table above ?
Because in the example below it says that we need to create an 8-byte array. Does that array contains 8 different positions or only one position described by 8 bytes ?
If anyone can help, it’s be very appreciated as I’m stuck and can’t understand how to send a command.
Thanks in advance !