Hi!
I m trying to control the motors in closed loop mode
the velocity limit is 30
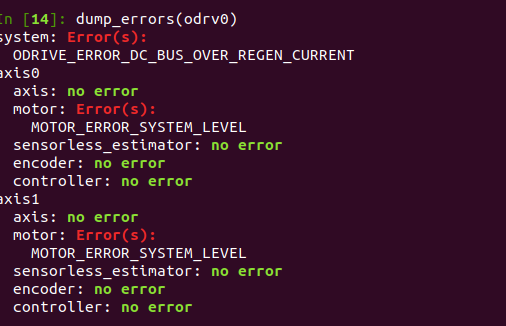
when I run the motor on 30, it rotates , however I got this error.
How to solve it ?
I use a battery to power up the system.
Hi!
I m trying to control the motors in closed loop mode
the velocity limit is 30
when I run the motor on 30, it rotates , however I got this error.
How to solve it ?
I use a battery to power up the system.
Did the error occur while running or while slowing down?
Did you set odrv0.config.dc_max_negative_current?