I am trying to get torque control working on my oDrive and am having some issues. My current_lim is 85, requested current range is 100 and my vel_limit is 40. My motor is 190 KV so my torque_constant is 8.27/190.
After tuning my motor and putting it into torque control mode, I feed it a torque of 0.1 and after a few seconds of accelerating, the motor errors out as follows:
I also tried a torque of 3 and it errors out immediately with the same error.
Furthermore, I lowered the vel_limit to 15 and now I’m able to feed it any torque value I desire without it erroring out, but now it is being capped by the vel_limit, meaning input_torque of 1, 2, 3, 10, etc. are all appearing as the same torque on the motor.
Have spent a long time on this and could really use some help! thanks guys!
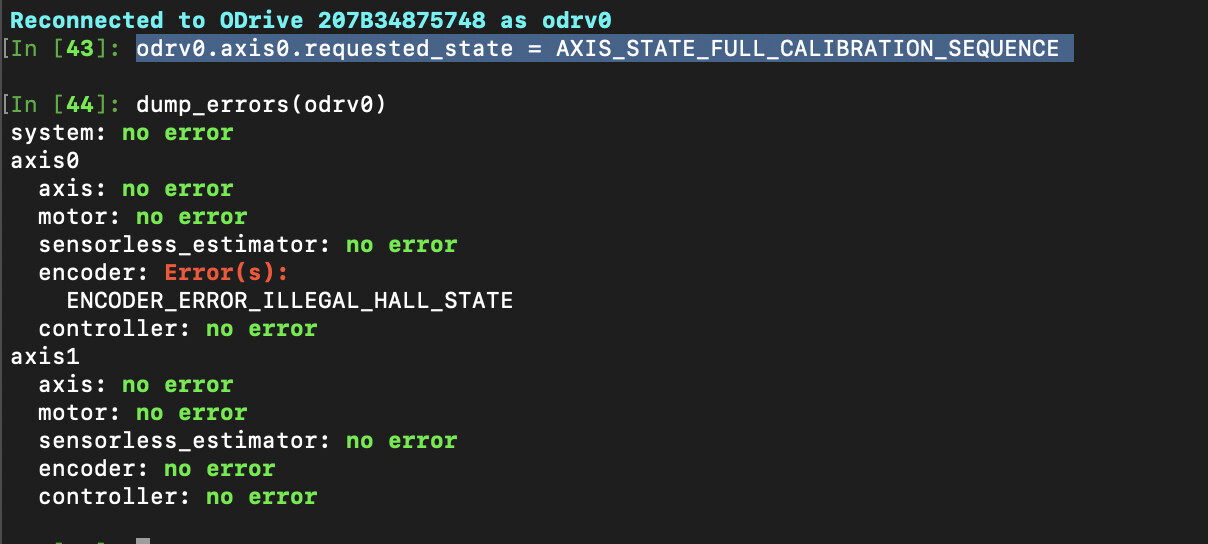
UPDATE: I updated firmware using odrivetool dfu, and the update was sucessful. However, now when I run odrv0.axis0.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE, I get hall state errors as follow. I havent changed anything in my setup before the update, and I double checked that the hall encoders connections are correct using my oscilloscope.
The configurations were also saved after the firmware update.
UPDATE 2: I just broke down the steps of full calibration sequence and its getting the illlegal hall state error right after odrv0.axis0.requested_state = AXIS_STATE_ENCODER_HALL_POLARITY_CALIBRATION
Yeah I have an oscilloscope to check the sensors. What exactly do you want me to look for? And I also noticed sometimes it passed hall polarity with no errors, but then encoded offset caused illegal hall state.
I added some more ferrites and this time it calibrated successfully on the new firmware which is good.
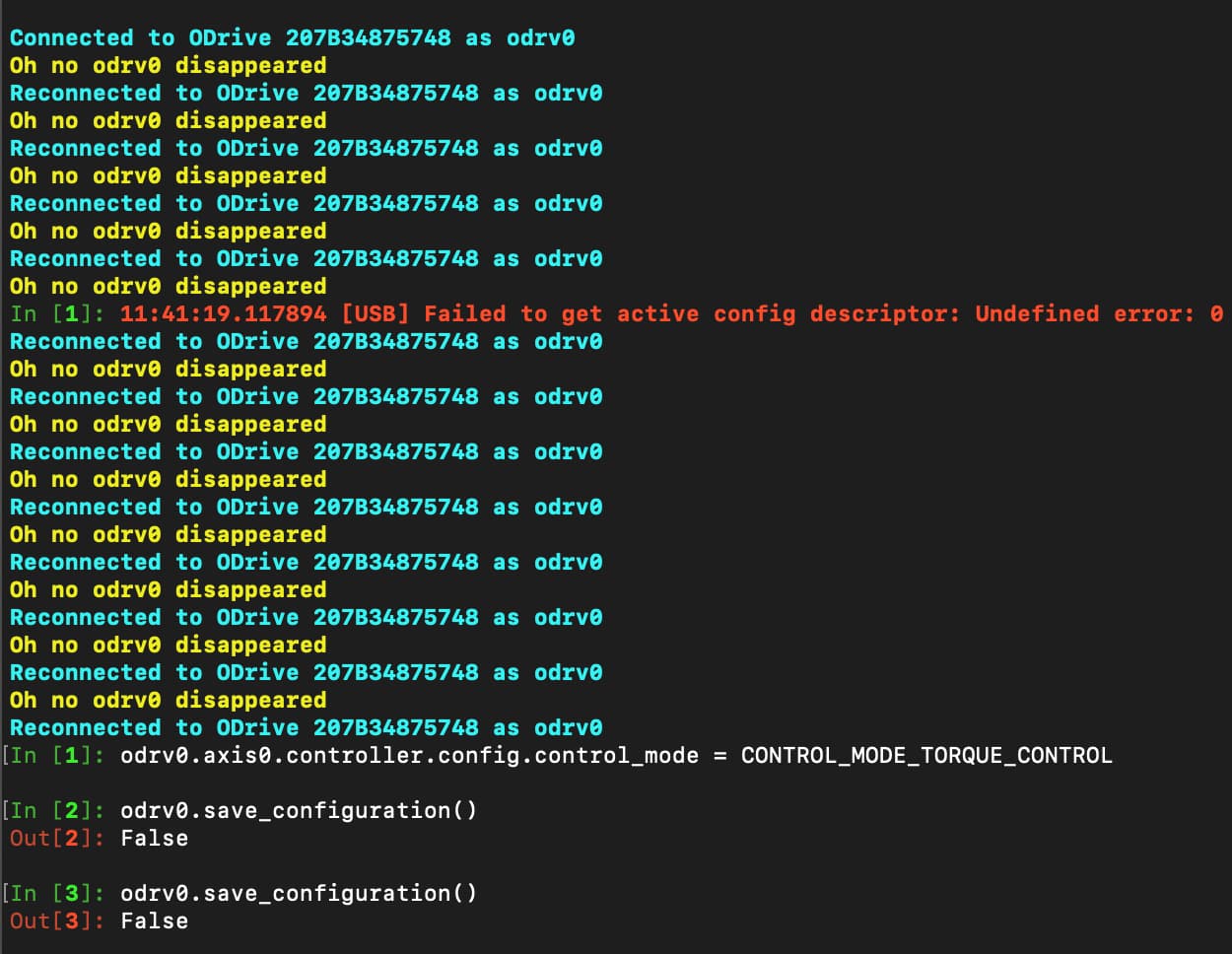
However, the board randomly disconnects and reconnects frequently. I’ve replaced the microusb and everything looks like a solid connection. Sometimes it doesn’t do this, but sometimes it does too – its random. Any ideas why?
Also, when I try to save configuration, I get false? Do you know why for that?
Lastly, when I get lucky and oDrive isn’t disconnecting rapidly, I repeated the torque test I mentioned above, and at a vel_limit of 20, input torque of 1,3,5,7, etc. don’t cause a physical increase of torque.
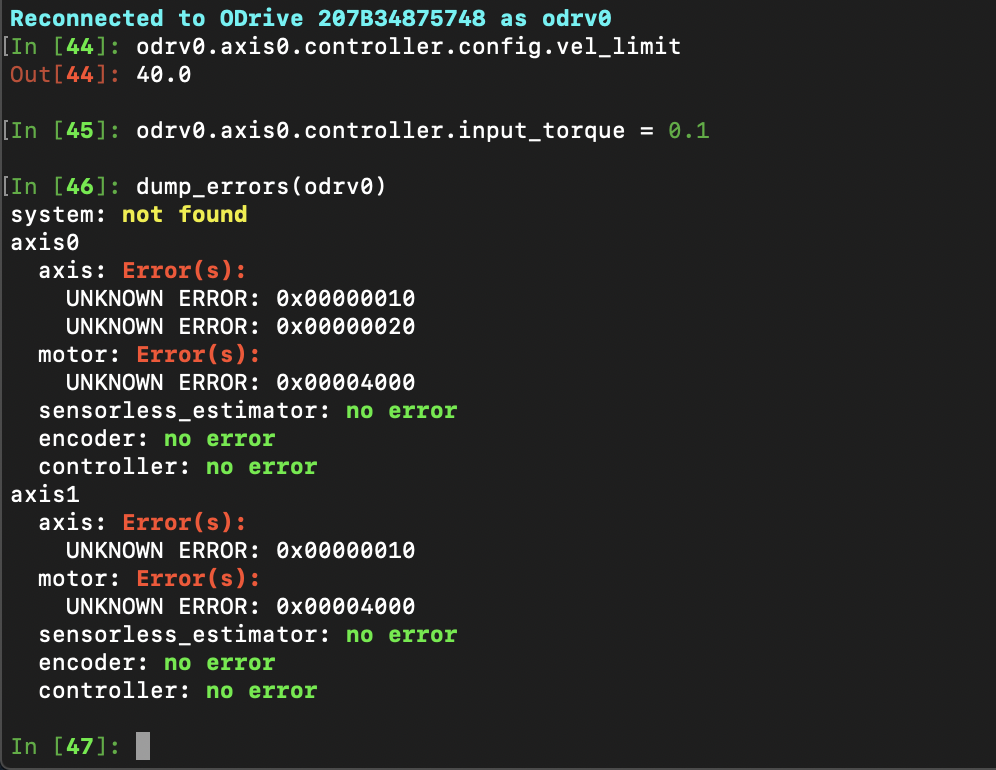
When I increase the vel_limit to 40 like I did above, I get:
Note: I utilized your suggestion from the other post and set config.enable_brake_resistor = True and config.dc_max_negative_current = -1
I am driving Flipsky 190 KV 6374 motors
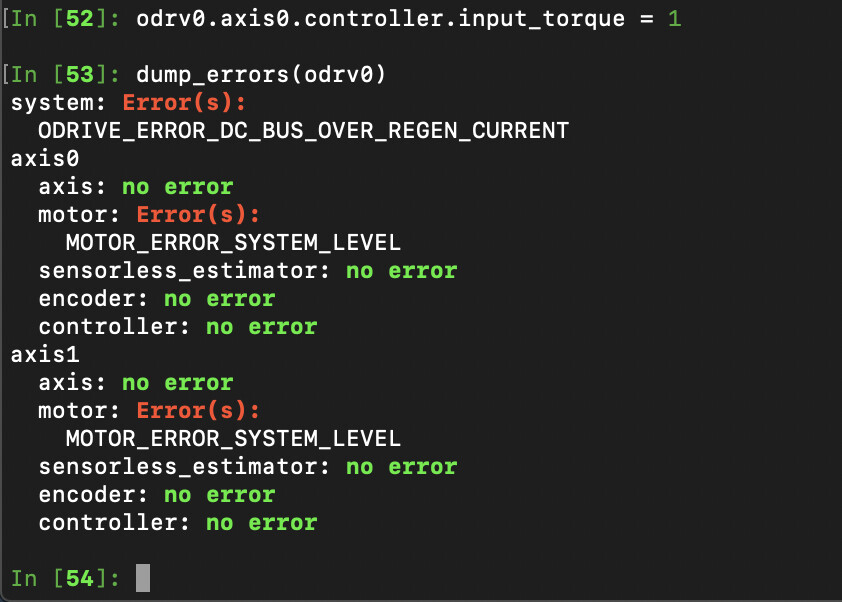
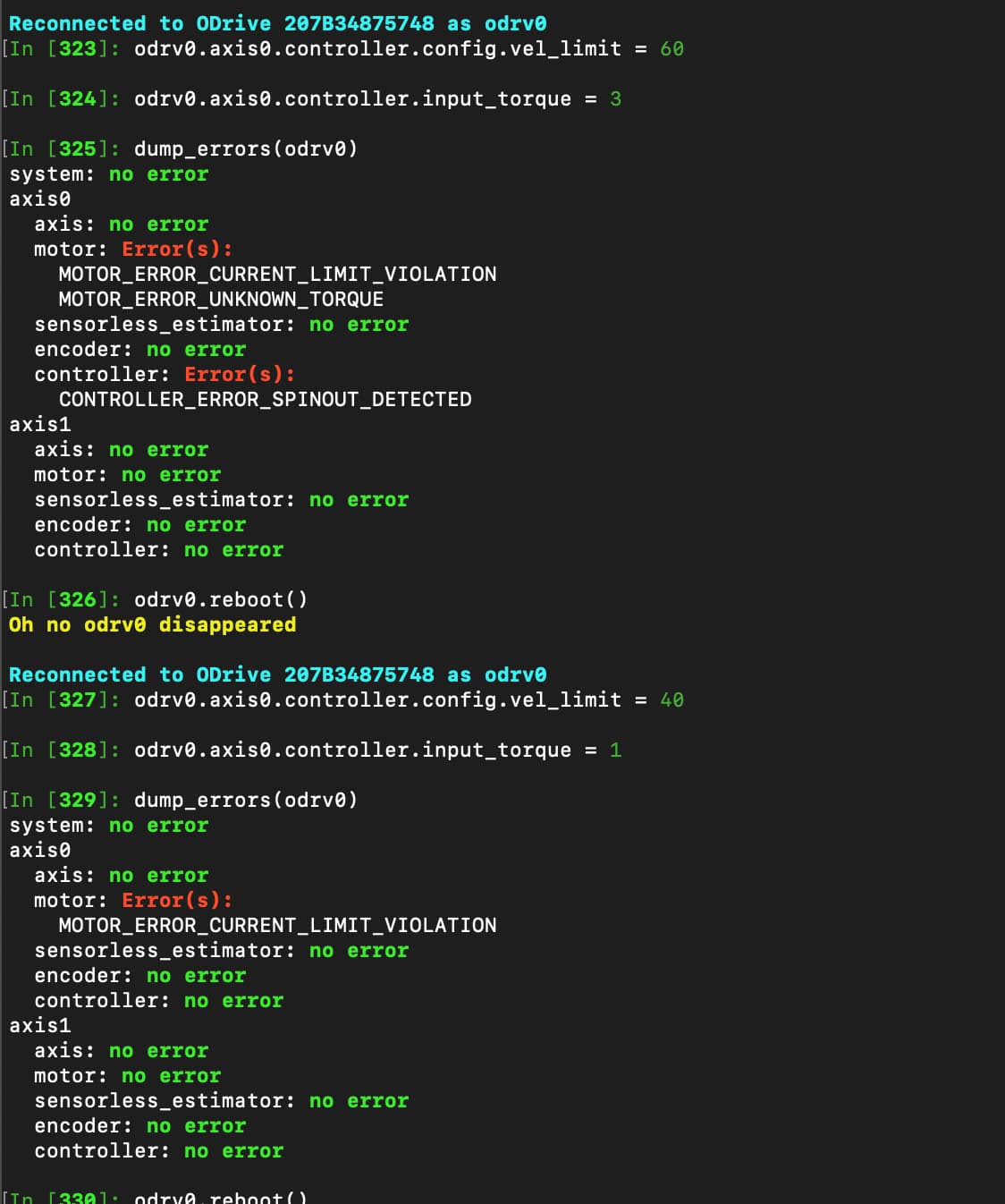
EDIT: I got the DC regen current to go away by increasing max negative current to -10 (which is safe for my setup). However now, the torque still doesn’t go up and I get errors like this at vel limits of 40 and 60:
At vel limit of 20, I dont get errors as I make input_torque 1,3,5,7 etc. but the motor’s physical torque doesn’t change at all. I’m also still having disconnecting/reconnecting issue and save_configuration issue.