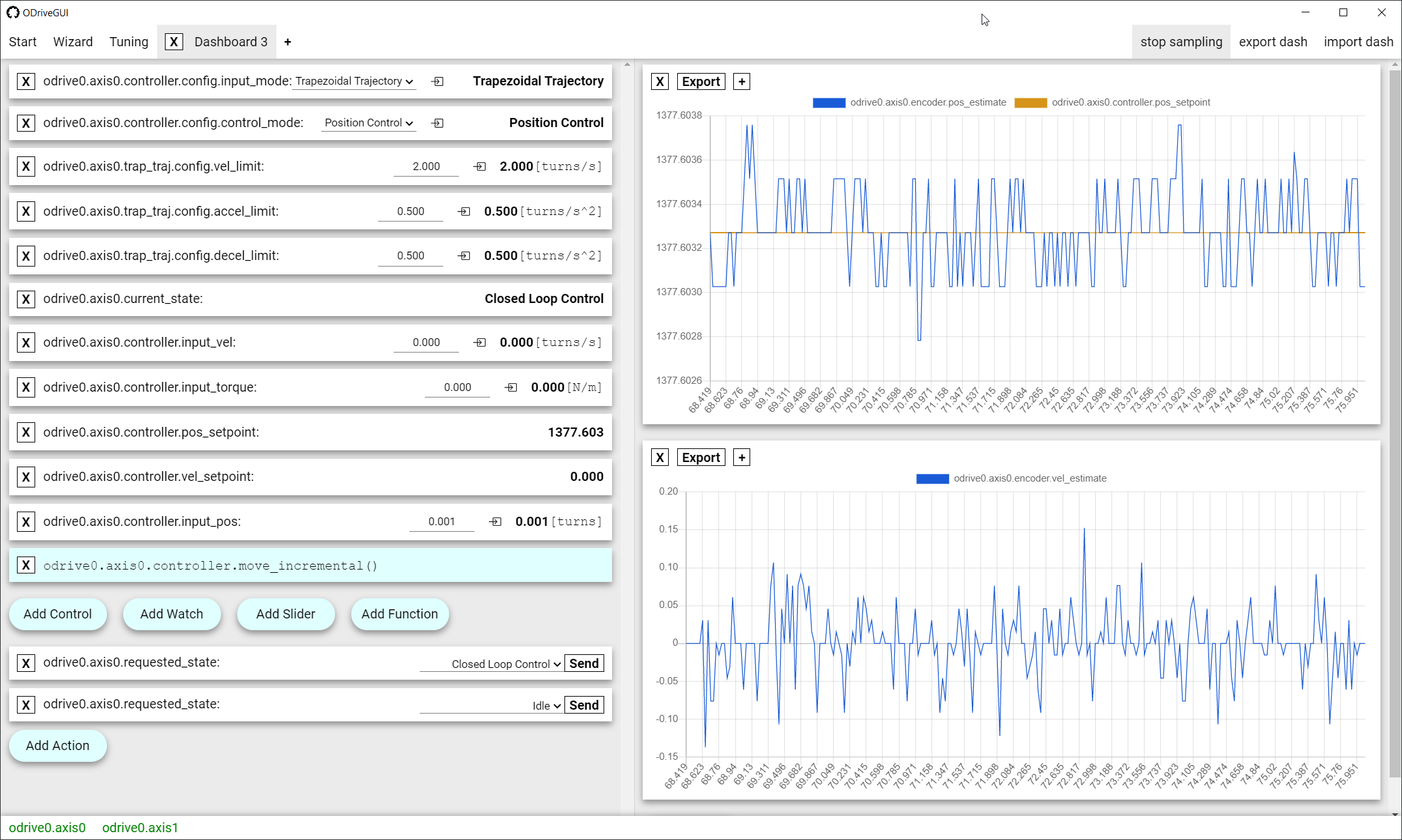
today i wanted to try out the TrapTraj-Mode, but nothing is happing. Neither when changing input_pos nor when calling move_incremental() function. See my current settings here:
Motor is fully calibrated, current_state = ClosedLoopControl but when i set input_pos nothing happens, the controller.pos_setpoint does not move at all…
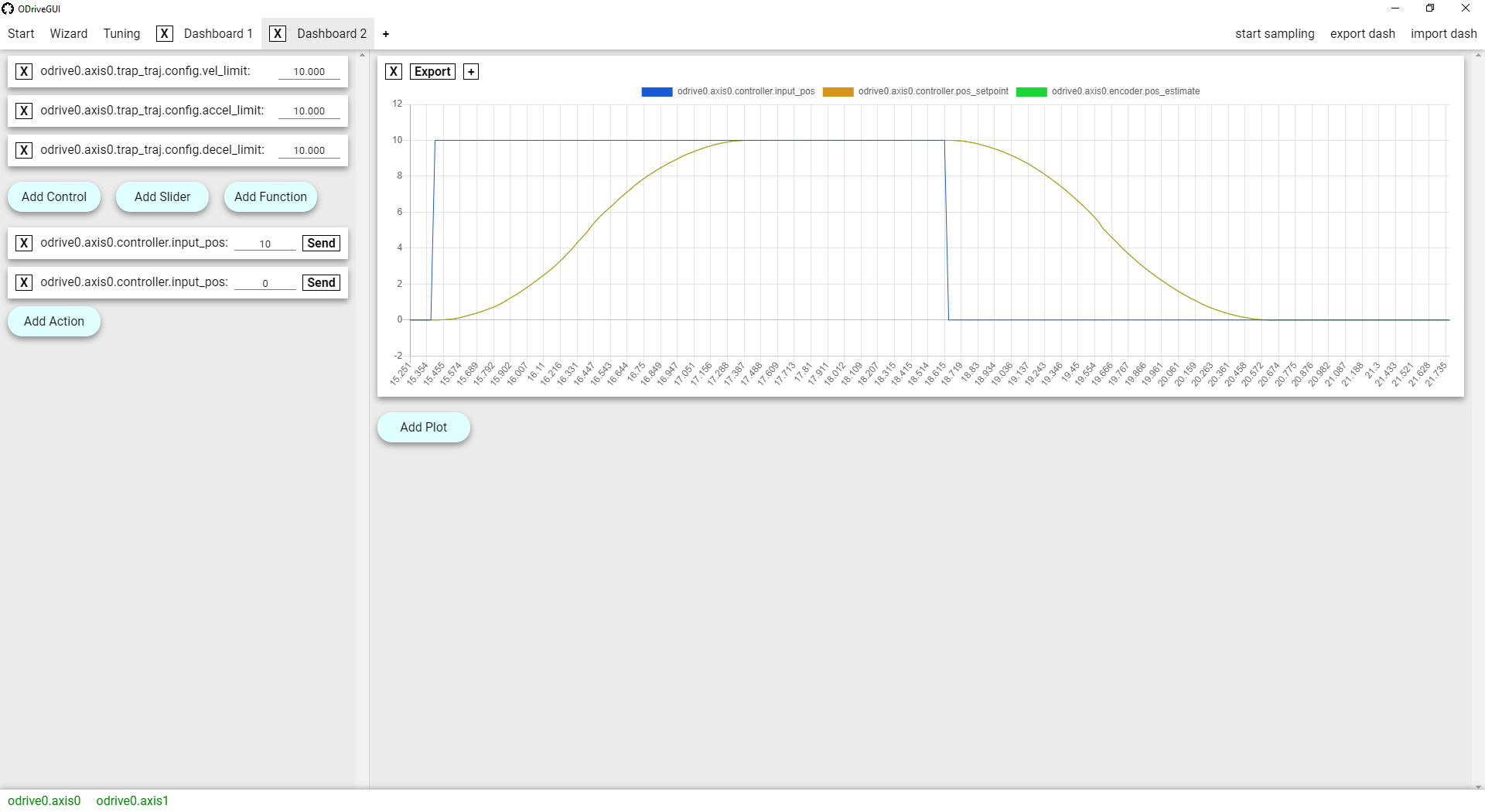
I’m facing a strange issue when in Trajectory control mode, the Input_Pos doesn’t actually lead to a change in the setpoint and the motor doesn’t move.
I’ve checked that there are no errors, the current state is closed loop, its in the Position Control mode. The issue is intermittent but very much persistent.
Hi , it appears that the firmware is unreleased? I’m not able to find a .HEX file for this? Can you provide a link on this or let me know when this will be officially released?
We don’t provide .hex files anymore, sorry. ODrivetool 0.6.3 and the STM32CubeProgrammer can both take .elfs. Is there a specific reason you need the .hex files?
I made the release official on Github a few days ago
The reason I asked was becuase, the Odrivetool dfu wasn’t working on my board and to update the firmware I had to go the manual route on a windows machine. Per the instructions you would need a ,HEX file to update it manually on windows.
Unless that’s changed, not sure if the instructions reflect that change.