Hello,
I am planning to build a pick and place machine so I bought Odrive board and after tinkering for a while with the odrivetool I found it very tedious to navigate through a bunch of settings in order to see or change configurations as you really need to learn where things are located. So I thought to make a UI tool for it to be able to see all configurations in one place.
So, I made this basic UI tool using pyqt5 and pyqtgraph. It’s work in progress but I am at the point where I get many ideas but not sure which ones to implement so I thought I will ask a community in which direction I should go.
Here are some screenshots.
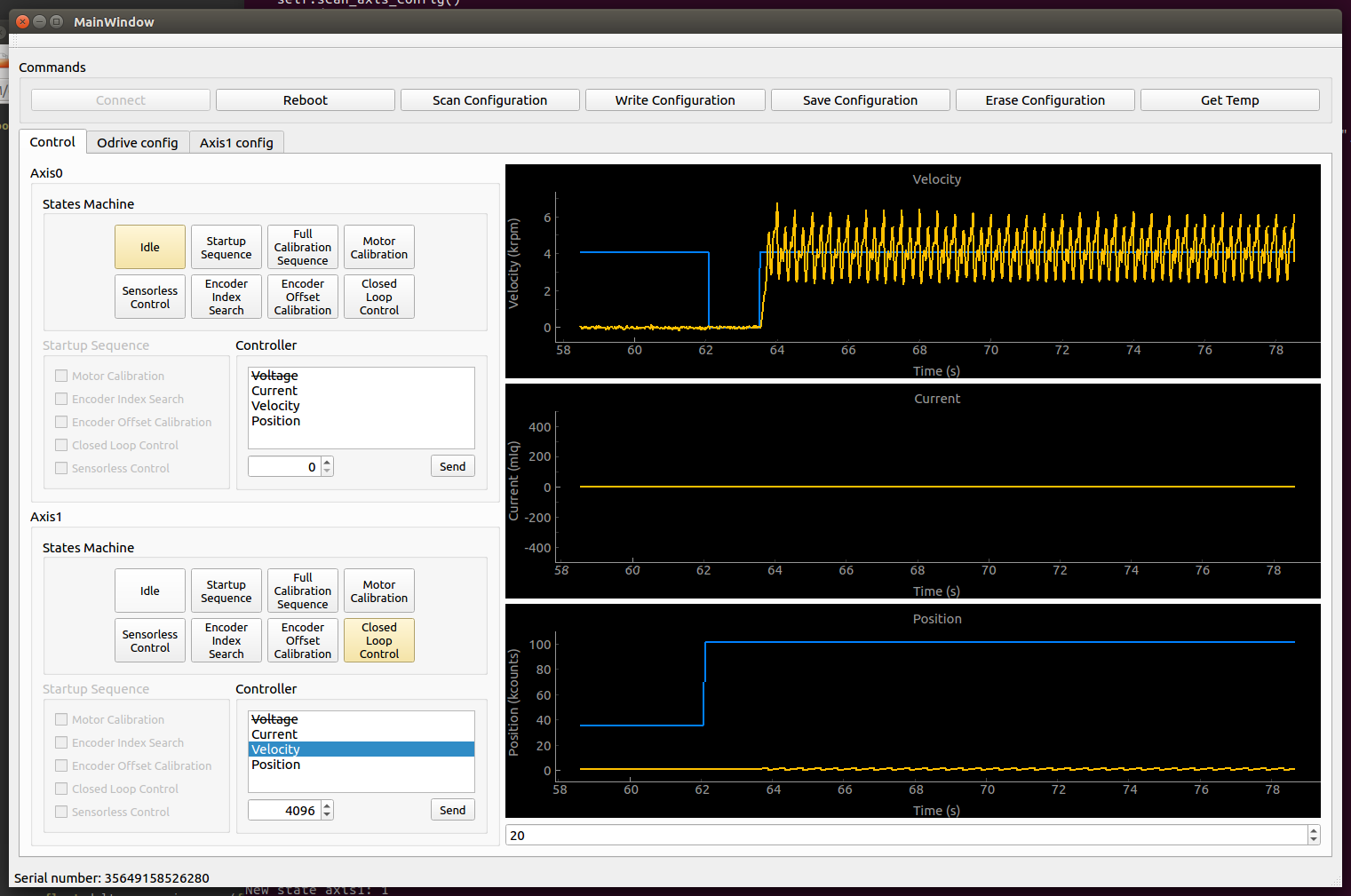
Buttons at the top are pretty much self explanatory. Scan configuration is to read all configurations from the board but it’s programmed to do it all automatically at successful connection. Write configuration is for sending configuration if anything is changed.
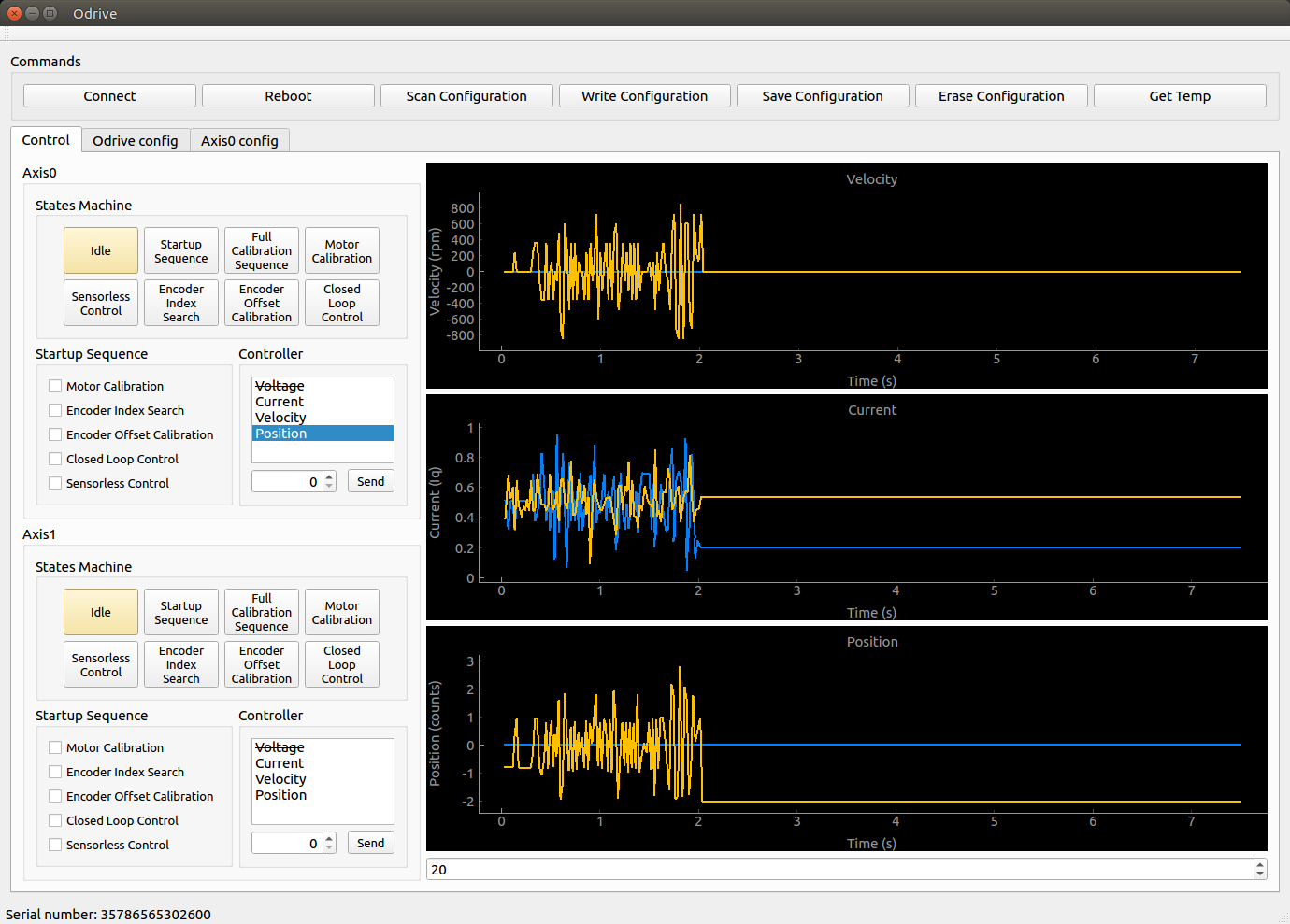
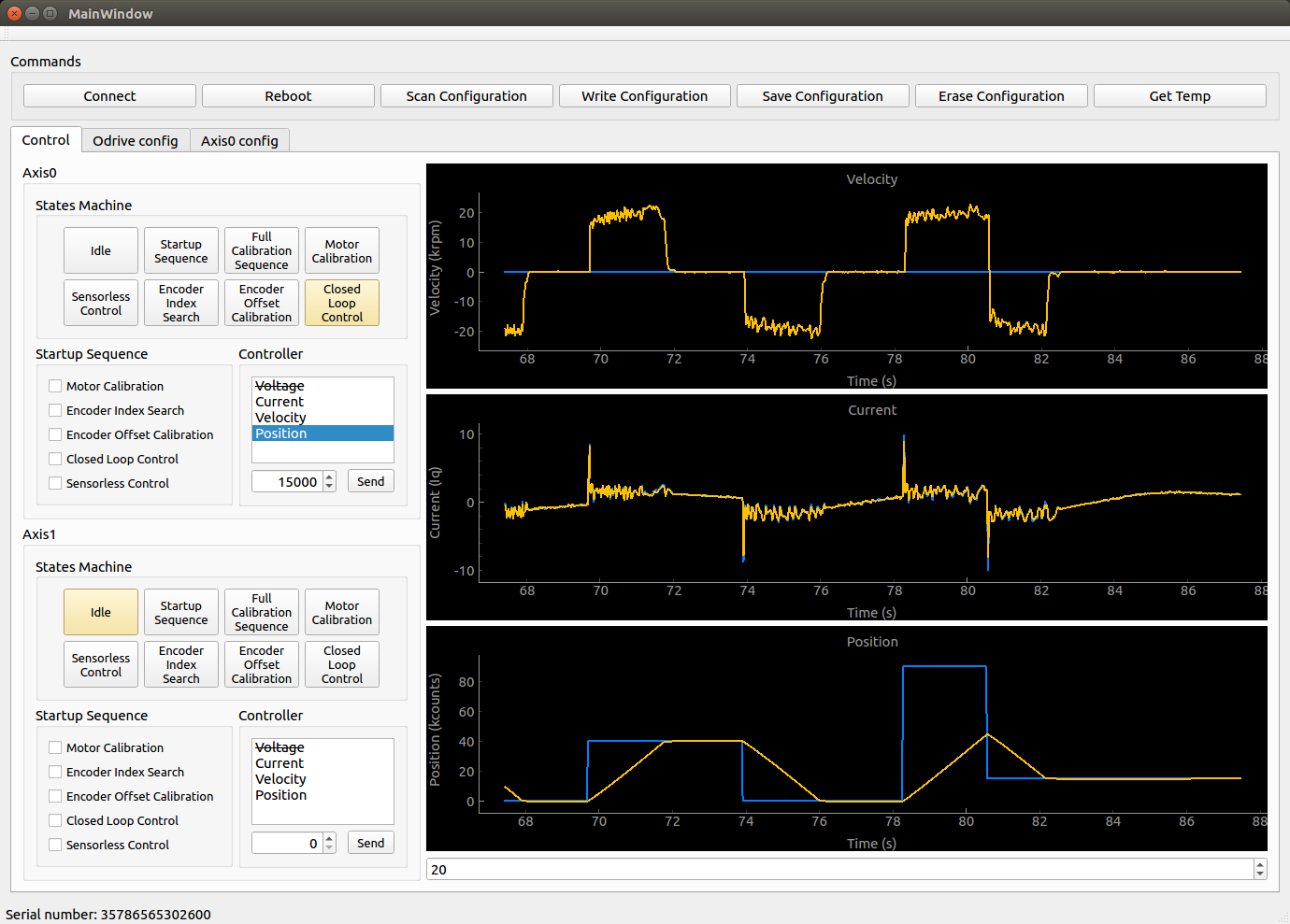
In Controls Tab you can select the Machine state and see which one is currently active. There are three graphs of velocity, current and position. Blue line indicates the set point and orange is for the current point.
If closed loop control state is selected you can choose control mode from the list and send commands.
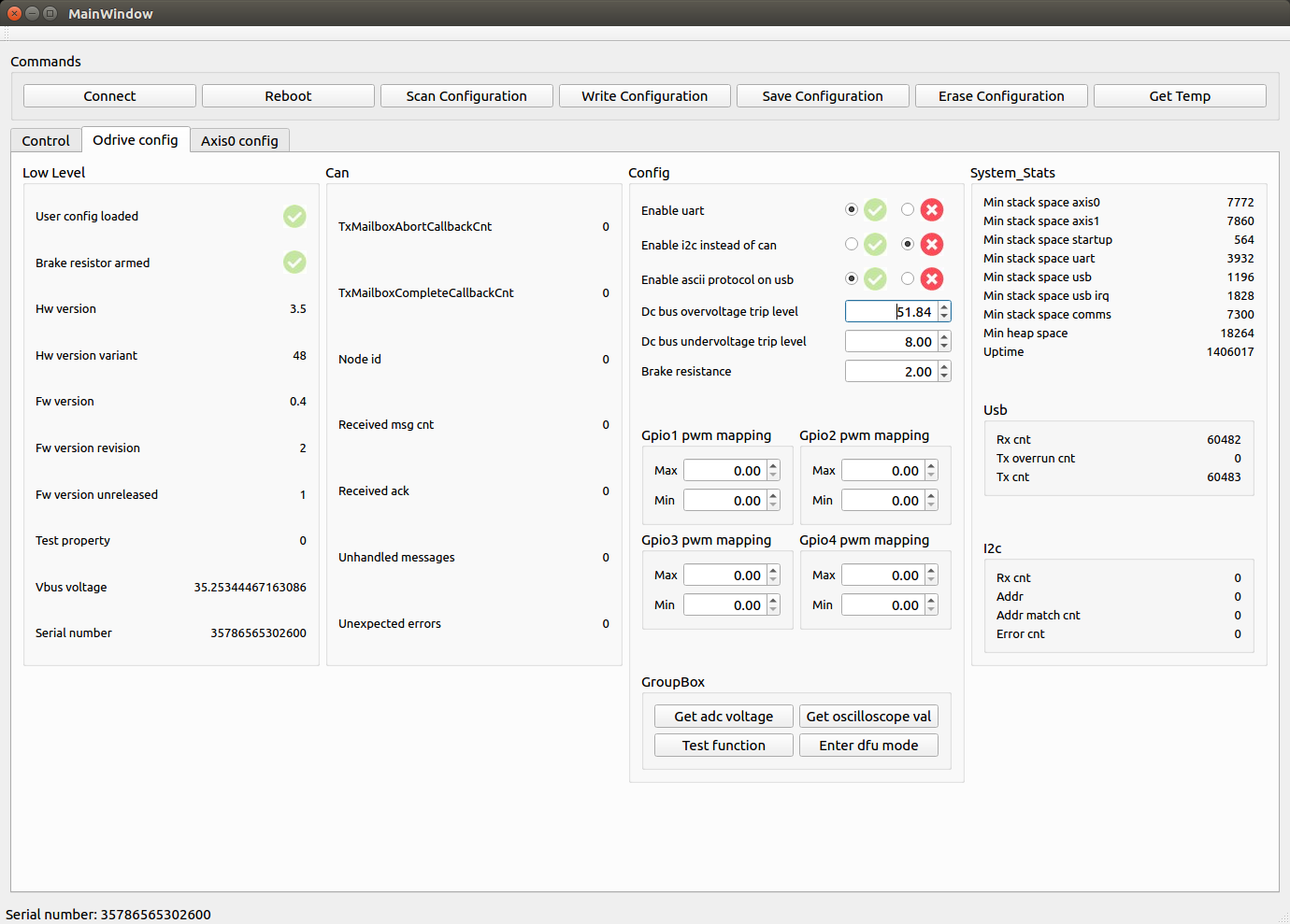
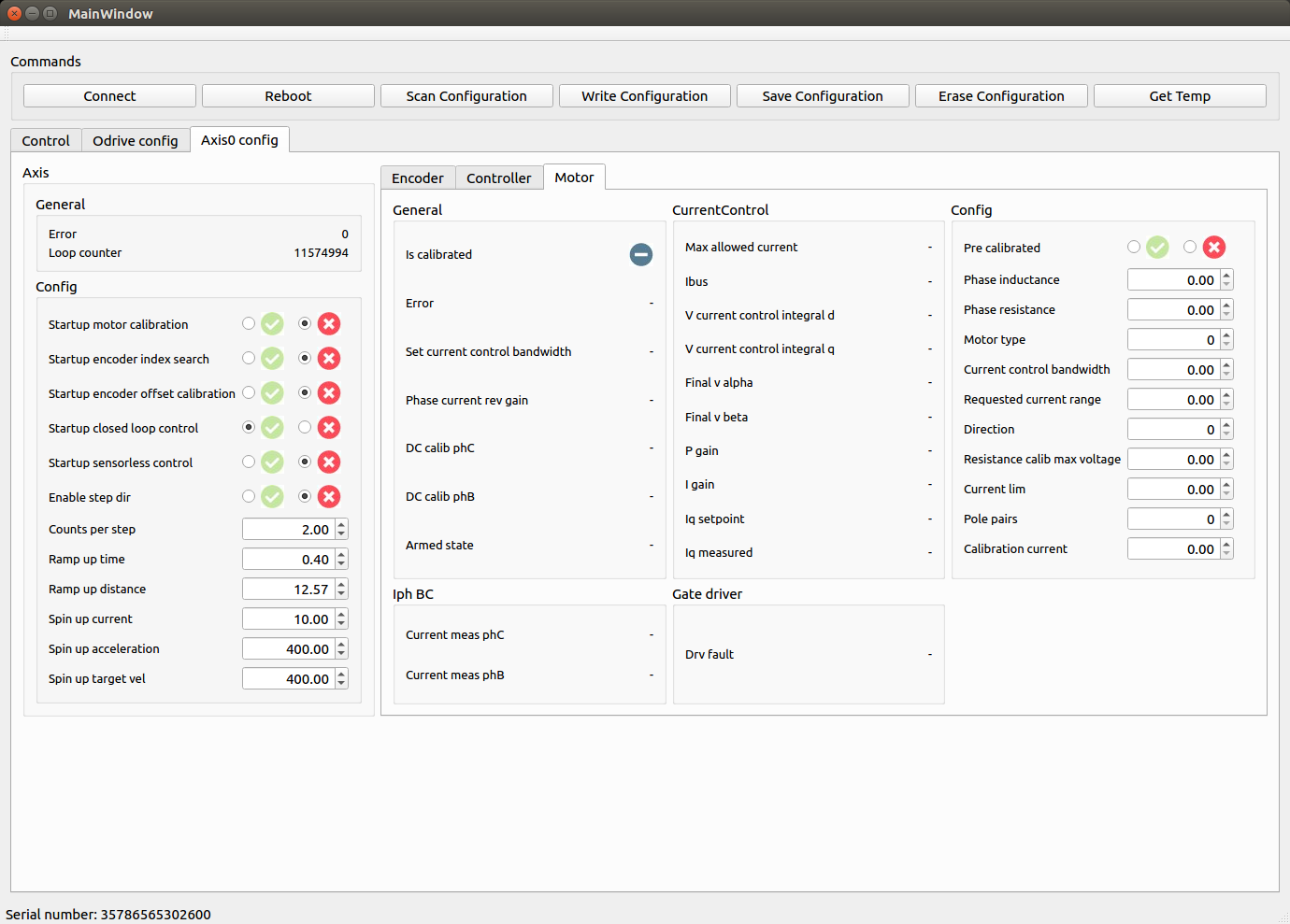
Configuration window was created a while ago, I believe some settings changed with the new update. I need to update things too. But it just reads all settings that odrivetool offers.

And here is a short video to show UI tool in action.
Only axis0 is functional as I am deciding what would be a good way of displaying it all. And how should I write the code so I don’t have to repeat all the settings for both.
Also, I was thinking of adding Jog functions like in OpenPnP just to move axis instead of sending numerical commands.
In general, I would like to know if anybody would be interested in using such a tool.
I have no problem of sharing the code, I am just not sure if I need to choose some sort of license before posting and I would need to do some code clean ups so it’s human readable.
So please, if anybody has any comments, it would be very helpful.
Thanks