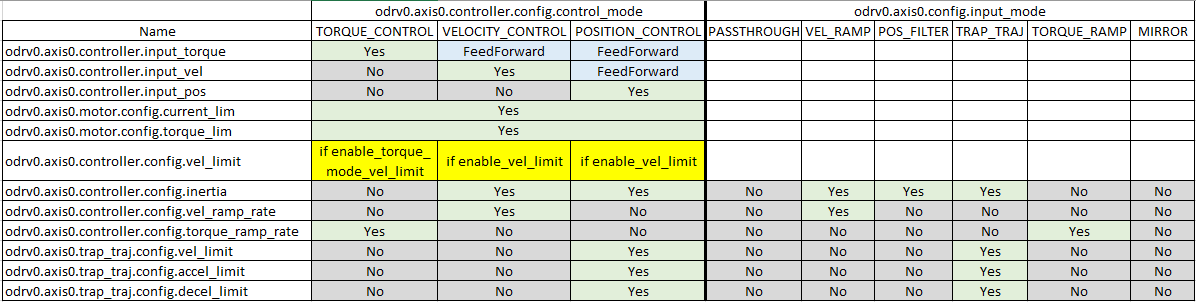
I’ve been going through the documentation trying to wrap my head around which parameters I need to pay attention to when operating in different modes. (e.g. I was confused when axis0.controller.config.vel_ramp_rate didn’t have effect when I was in position mode)
I’ve spent a while examining the code and making this spreadsheet for my reference.
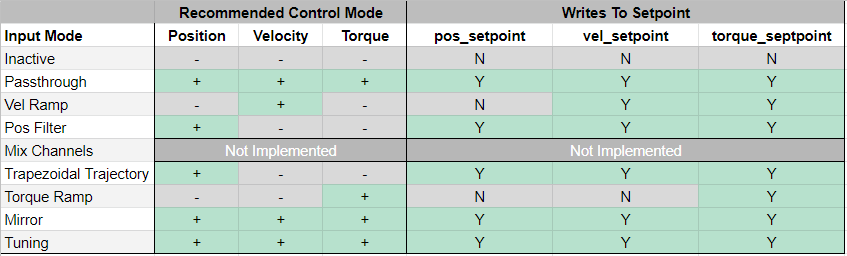
Sorry about the wait. That spreadsheet looks good! Strictly speaking, control_mode and input_mode are completely separate. But certain control modes only make sense in certain input modes. For example, it doesn’t make sense to use INPUT_MODE_VEL_RAMP in position because VEL_RAMP doesn’t write to pos_setpoint.
In short, an INPUT_MODE writes to one or more of pos_setpoint, vel_setpoint, or torque_setpoint, and the control_mode should be the highest setpoint written to. If that makes sense…