Dear Mr. Stijn
Really many thanks for your support and your hard attractive work.
I start testing/work now and feedback you.
I just have question: can I use 12v power supply instead of 36v of hoverboard battery ?
just in testing phase, for safety.
If yes, I need to change any parameter in configuration step ?
Dear Mr. Carelsbergh
Greetings,
Really, many thanks for your support.
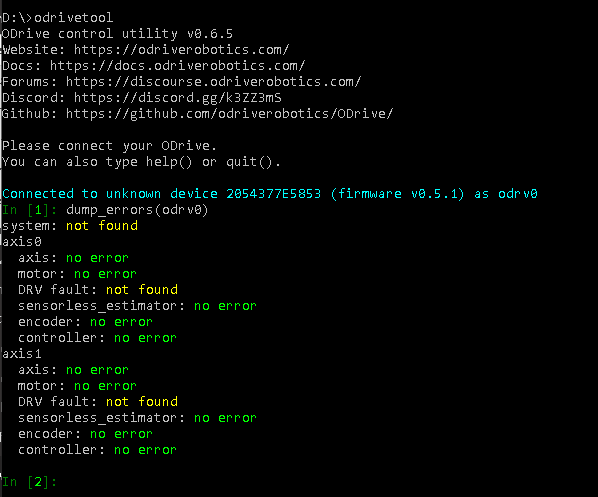
I configured Axis0 of ODrive and worked well, while Axis1 not worked at all.
I tested many times, the motor not spin at all, even I changed the locations of two motors, the Axis1 of ODrive not worked at all.
Attached backup of configuration .json file and no-errors seen from the ODrive as attached image also.
Are you estimate the problem ? and how to solve it ?
( sorry I can’t find attached icon in this reply to attach configuration backup file )
Many thanks for your support,
The configuration worked well now, thanks a lot.
Now I need to test more deeply, your system,
But I have problem to understand the remote keys (to simulate them even in mobile app)
i.e. what are meant by following parameters:
RFB, RLR , RT , LFB , LLR and LT
if you have drawing or figure to remote control also sure it help me.
The purpose now, make same remote by mobile app (I can do it just after know remote keys and function).
Best regards
I tested most of your system, until now every thinks are good,
I have question out off that scenario,
That I first time work with ADXL345, it measure the gravity only ?
I can’t use it to get the direction of robot ?? i.e. may one wheel delayed or wheel slip than other so I need to compensate the error in direction of moving, so I need to get the direction of robot (right/left,…)
I how can I do that by ADXL345 ?
I already use ADXL345, but the orientation (Z-Axis) not get good reading.
Z-Axis give 1.0 and change to 0.0 suddenly.
I don’t know if the board is defected in z-axis (where other axis work well)
Are you have tested ADXL345 for orientation correction (read z axis good) ?
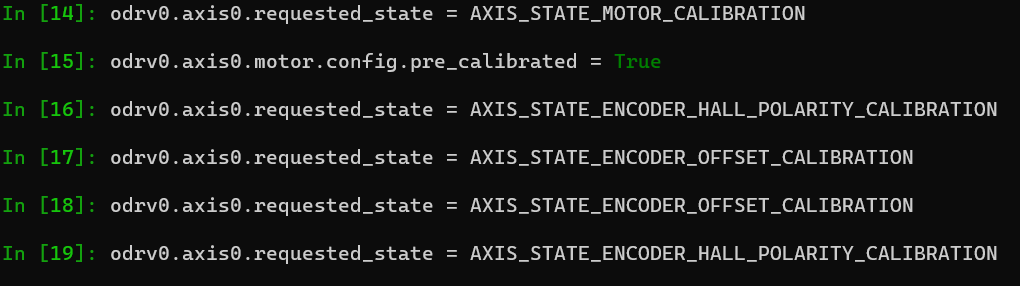
We have a problem after AXIS_STATE_ENCODER_OFFSET_CALIBRATION, the wheel on axis0 not rotating. we calibrate the axis1 and its fine but when we calibrate the axis0, its not functioning well when we code the AXIS_STATE_ENCODER_OFFSET_CALIBRATION. Please anyone can help us about this problem? Thanks alot!