I’ve been using an odrive 3.6 successfully with a 32V, 10A power supply to control a D6374 motor. I want to run it at higher torques, so have swapped to a 48V 50A Meanwell power supply (an RSP-2400). But now I find the USB connection keeps dropping out as soon as I send a command to move the motor.
I have a USB isolator connected to my PC, and am using the USB cable that came with the odrive. The cable from power supply is about 80cm long, twisted along its length, and the cables from odrive to motor are about 30-40cm long. The mains cable from the power supply is about 60cm long, and I’ve tried to keep it physically separate from the DC output as much as possible. I’ve also tried to keep the USB and DC cables to the odrive as far apart as possible. Other than encoder, motor thermistor and a button connected to RST to act as a stop switch, nothing else is connected. My understanding is that with the USB isolator, I shouldn’t be having an issue with ground loops, correct?
I’d be grateful for any suggestions how to resolve this problem.
I am also struggling with these USB issues. Using odrivetool gives me many “oh no odrv0 disappeared” errors.
I have 2 odrive boards powering 3 motors. The errors occur when powered by different power supplies, including batteries. The encoder cables are very short at about 150 mm long and are routed away from other cables as much as possible. A grounded aluminium plate provides a shield separating the power and encoder cables. I have USB isolators in the connection from the Raspberry Pi USB ports and the odrive USB ports. The phase cables from the motors to controllers are only 100 mm long. The cables are far to short to fit the suggested ferrite rings. It seems counter intuitive but would it be an idea to make the motor phase cables longer and include the ferrite rings?
I am at a complete loss about how to move forward. Any ideas anyone?
Definitely try some ferrite rings. They absorb common-mode noise which includes capacitive coupling between the windings and the motor iron, which without a ferrite can cause the whole motor to become a big antenna, regardless of the length of the wires. The noise power for capacitively coupled noise can go with the square of bus voltage, so you can also try reducing your bus voltage and see if it goes away. If it does, you know what it is.
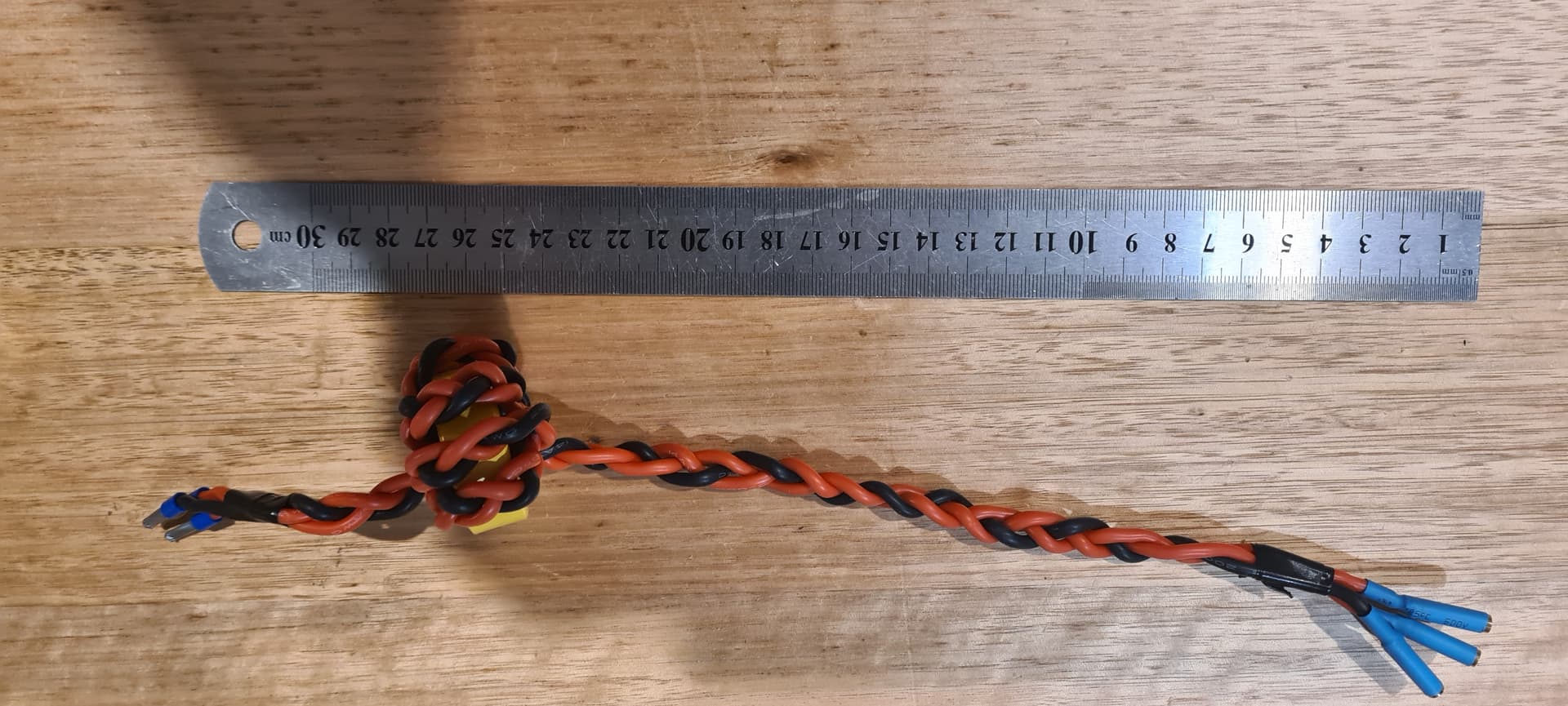
I bought this ferrite ring from RS which looked like a pretty good match for the one available in the odrive store (I’m in the UK and wanted to test ASAP). I believe the dimensions are the same, but I could only manage one turn of the motor cables. Unfortunately I see exactly the same behaviour - I can connect ok, but as soon as I command a move the connection goes down. I also have a 24V, 96A supply - I’ll give that a go and see what happens.
Would a physically larger ferrite ring which can accommodate more turns be worth a try?
Hooked up my 24V power supply. I’m able to jog the motor around, but if I do a demanding move (motor current ~20A or greater), the connection goes down. I’ve ordered another ferrite ring with a slightly bigger ID so I can get more loops of cable through it. I’ll report back when it arrives.
Hi all, Ferrite rings seem to have solved my problems with USB errors. I have used quite large rings and have looped each of the three phase wires 5 times. My cables are now very much longer than before to accommodate the rings. It seems that I was wasting my time with USB isolators, cable routing and looking for earth loops. Ohhh God, I hope I haven’t spoken to soon!
I bought this ferrite ring, managed to loop four turns of my (now twisted) motor cables through it, and it seems to have solved my comms problems. I then also increased my cable length to about 2m (which I’ll require later on), and still no comms problems. I have other issues, but I’ll post about that in a separate thread!
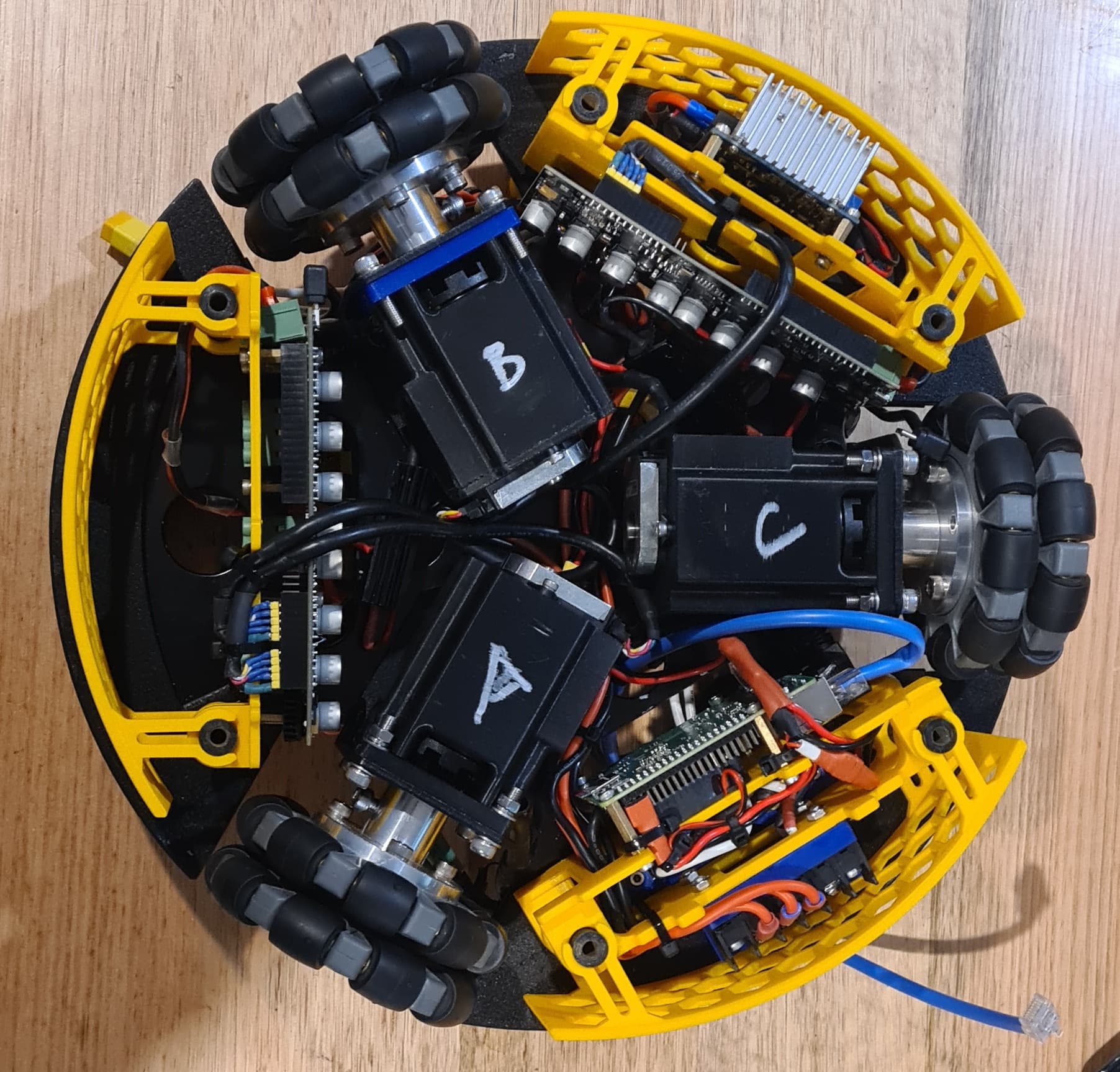
The other image shows the underside of the robot with the cover removed and before installing the 3 wiring harnesses. You can see that space is at a premium!