I applied the oddrive to the motor with speed reducer. The encoder was installed on the motor side, and the deceleration ratio was 9:1, and the power supply is 24 v.
Some settings are as follows:
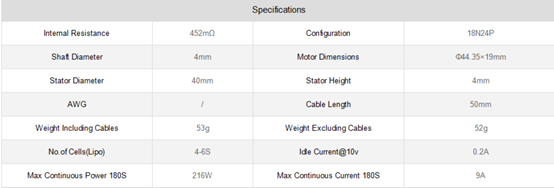
odrv0.axis0.motor.config.pole_pairs = 12
odrv0.axis0.encoder.config.cpr =5000*4
odrv0.axis0.motor.config.resistance_calib_max_voltage = 4
odrv0.axis0.motor.config.calibration_current = 8
When I use the position control, when the position setting value is nine turns (the reduction ratio is 9:1), the end of the gearbox does not reach one turn, and the motor is stuck in the middle of running, and the current rises sharply.
I would like to ask which parameters need to be changed when using the motor with deceleration device. Thanks.