Greetings.
I’ve a BLDC micromotor (low current) and Odrive. I want to drive this motor with Odrive. I know, it has low current and I have to change shunt resistors on Odrive. But before that I want to learn, could I drive this motor with full performance? Actually I had received small motions but it was coincidence.
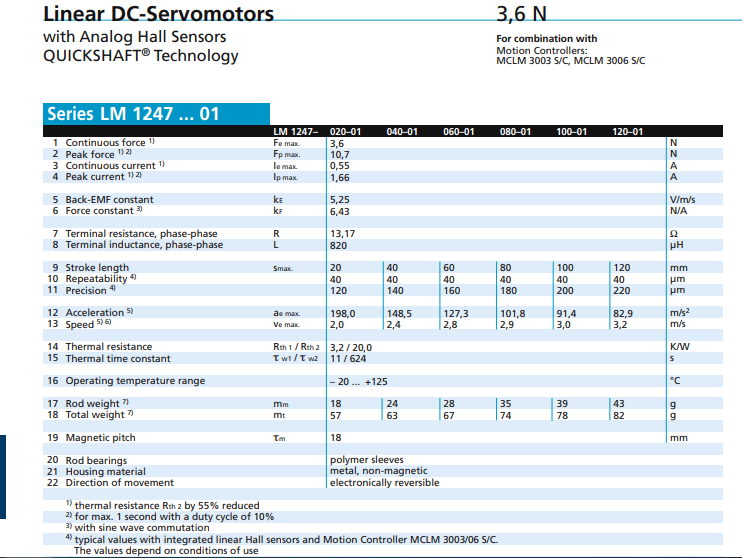
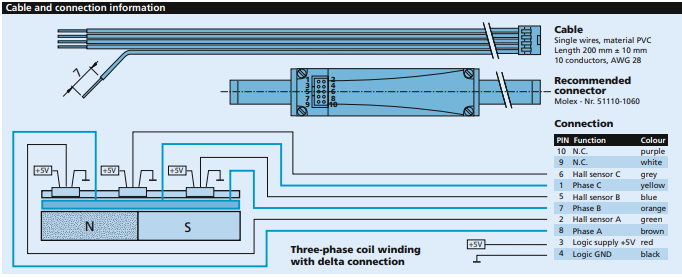
Motor: lm1247-020-01 (Faulhaber)
Datasheet:
Parameters I adjusted:
odrv0.axis0.motor.config.current_lim = 1.66 (from datasheet)
odrv0.axis0.controller.config.vel_limit = 50 (average value)
odrv0.axis0.motor.config.calibration_current = 0.8 (I think it’s OK)
odrv0.config.enable_brake_resistor = True (I use)
odrv0.config.brake_resistance = 0.5
odrv0.config.dc_max_negative_current = 0.01 (Actually I don’t know. How can i find?)
odrv0.axis0.motor.config.pole_pairs = 2 (because linear, i think it’s OK)
odrv0.axis0.motor.config.torque_constant = 1
odrv0.axis0.motor.config.motor_type = MOTOR_TYPE_HIGH_CURRENT (?)
odrv0.axis0.encoder.config.cpr = ? (Unfortunately I dont know).
I must write many parameters but they are not included in the datasheet and I don’t know the equivalent of other parameter commands in Odrive.
What should I do step by step? I am not very advanced in these matters. Thank you for your help in advance.
