Hey guys I’m running into to problems using a 470 milliOhm resistor with my 3.6 56V ODrive.
Background:
The included 2Ω resistor works correctly but since I’m using 24V bus voltage I can only push ~8A through it (0.9 * 24V / 2.55Ω = 8.47A).
I also used an ESR meter to measure the resistance at the ODrive’s brake terminals to verify the resistors (measured values below).
I have tried:
- 50W 2Ω resistor (measured at 2.2Ω, odrive config at 2.55Ω). This is the included resistor, working correctly
- 100W 0.47Ω resistor 1 (longer leads, measured at 0.623Ω, tried odrive config at 0.66Ω and 0.75Ω)
- 100W 0.47Ω resistor 2 (short leads, measured at 0.5Ω, tried odrvie config at 0.55Ω and 0.66Ω)
Note: I also tested the 100W 0.47Ω resistor with longer leads on three 3.5 24V ODrive boards. They all worked correctly with no problems (with same odrive config values).
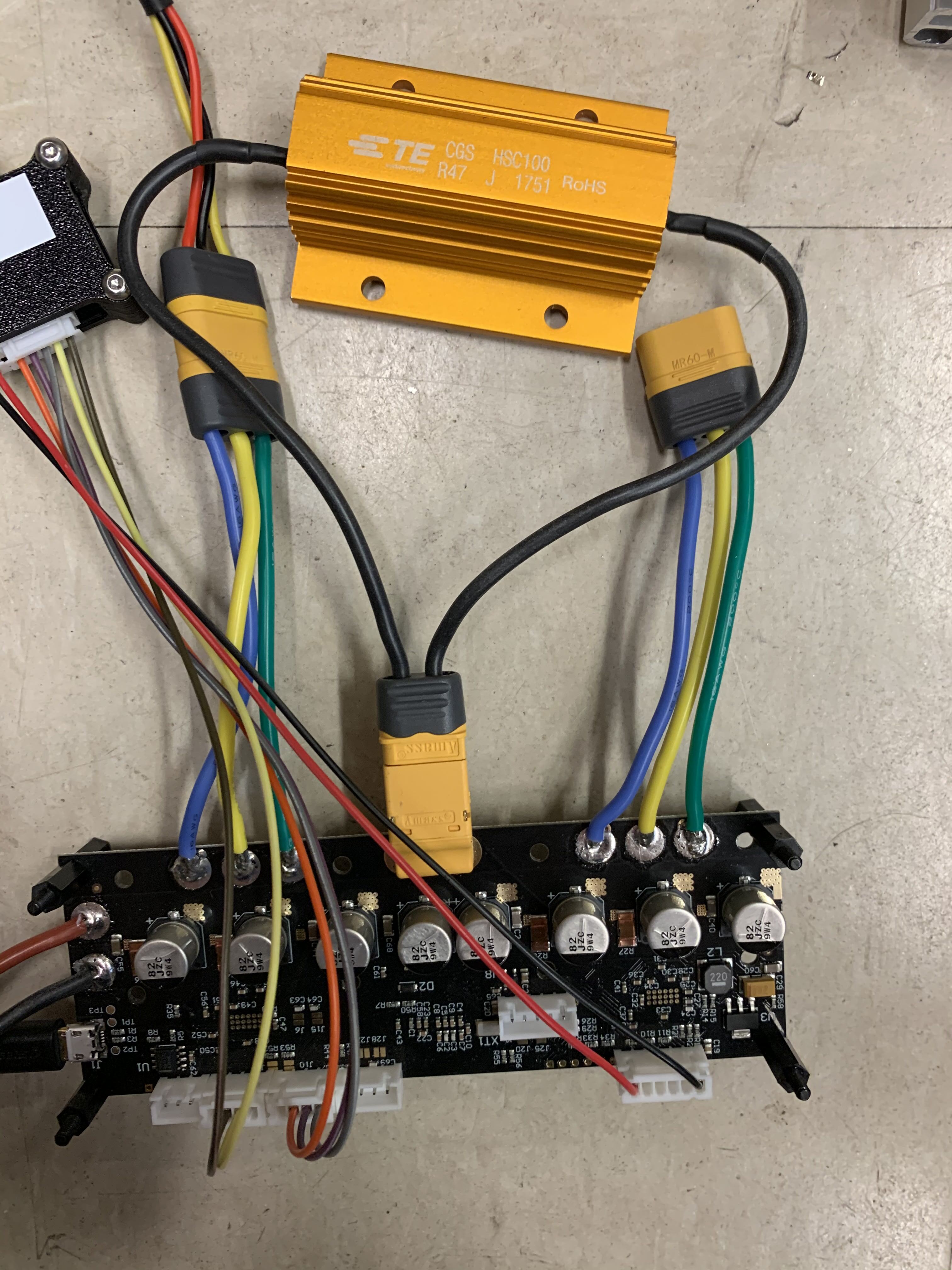
Pictures of setup:



Problem:
Regardless of what resistor I use I can calibrate correctly and enter closed loop. The problem comes when I try to move a load vertically upward (NOT when braking).
The strange part is, in all cases I get ERROR_CURRENT_LIMIT_VIOLATION. Checking the code, the brake resistance should only throw brake duty cycle errors or trigger a DC bus overvoltage error if too much current backflows. Neither of these happen.
I recorded the current and indeed the ODrive suddenly tries to pull a large current. I have the current limit set to 8A with 2x limit tolerance. It tries to draw over 16A. If I increase the current limit the ODrive attempts to draw more current.
Like I said, the included 2.2Ω brake resistor works fine, the 0.47Ω resistors work fine on the 3.5 24V ODrives I have, and interestingly if I just remove the resistor entirely the problem also goes away (although I obviously can’t decelerate).
Is there any physical change on the 3.6 56V ODrive that would cause this?
I’m at a loss as to what would cause this…
@madcowswe, @Wetmelon
Any help would really be appreciated, thanks!!