I did not find positioning procedure.
Are you going to implement exact 3d positioning?
For Steward’s platform (hexapod) there is some math to resolve tajectory.
If you write something about it that I’ve missed, please point me, I’d love to read it.
Is there a link to your wonderful spreadsheet? I just uploaded Wetmelon’s firmware with endstops… is there a guide or a list of commands to using that repository?
Hi Tomsepe!
wellcome to the thread!
Regarding your question: My spreadsheet was a little messy, but I tried to clean it up a little bit for you.
I uploaded it to Dropbox. You can use the following link:
Important note!!!: This sheet is only my personel understanding how commands are build in Odrive. Some of the commands was tested and worked, some was not tested, not checked and still not understood! Using those settings are at your own risk!!!
Unfortunately though, none of the endstop commands are showing up for me.
I’m on Ubuntu and I downloaded the Wetmelon repository and tried flashing the board…
it does:
erasing… done
flashing… done
verifying…done
waiting for the device to reappear…
and then I get a bunch of errors.
But it appears as if the board got flashed… however none of the endstop commands are available.
AHH! I figured it out! I hadn’t downloaded the development tree properly! Its github’s fault. When you click on the “clone or download” button on this page: https://github.com/Wetmelon/ODrive/tree/Endstops
and if you get the link to clone “https://github.com/Wetmelon/ODrive.git” it is not the right branch.
but if you download the ZIP file it is correct from this page it is correct.
arrg so frustrating. @Wetmelon FYI
I think it’s time for a little update on my project.
The last weeks I have continued a bit with the production of the parts. The production of several identical parts is much easier than it was with the prototype. Meanwhile more than half of the parts are finished -see picture.
This time I also produced the motor flanges as laser parts. They are super cheap and precise and only need a little rework. Very recommendable! I have also ordered some more parts, if somebody wants to rebuild my actuator…
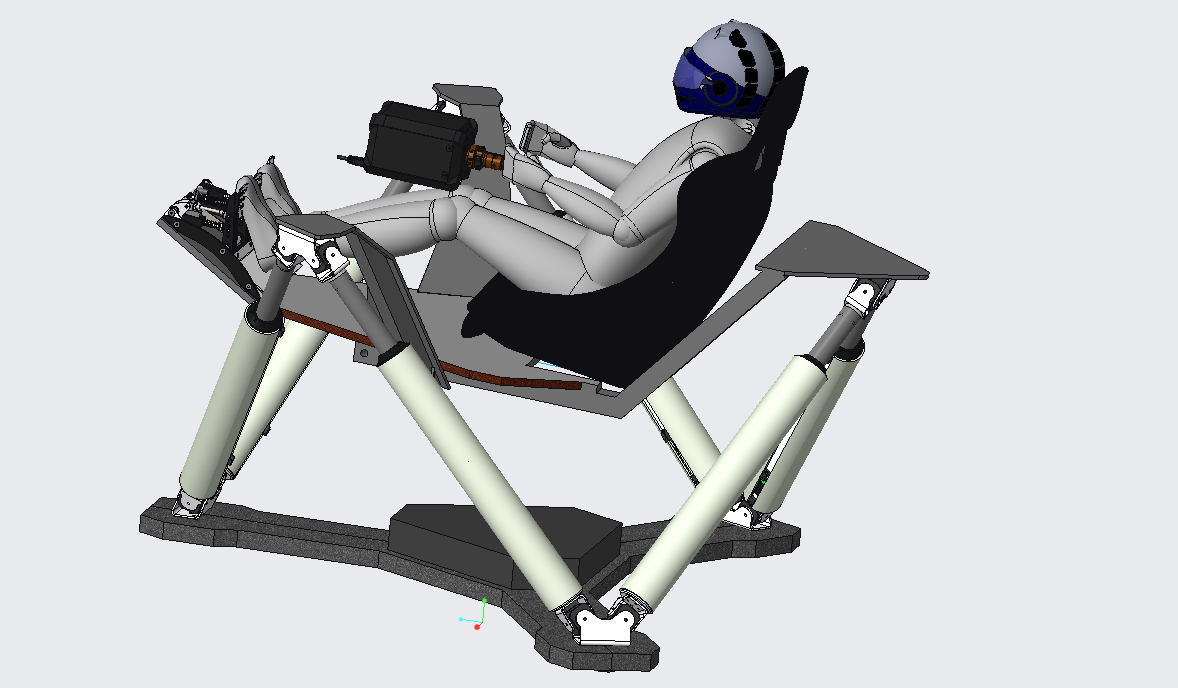
As you can see I changed the design of the base – It was due to a proposal of my son - and what shall I say - we love it!
For the material of the base I decided to make it from reinforced concrete. The reason for this material is because I wanted to have a stable and heavy base and minimum of vibration noise coming from the actuators.
And last but not least - I think it will look super cool (at least in my opinion ).
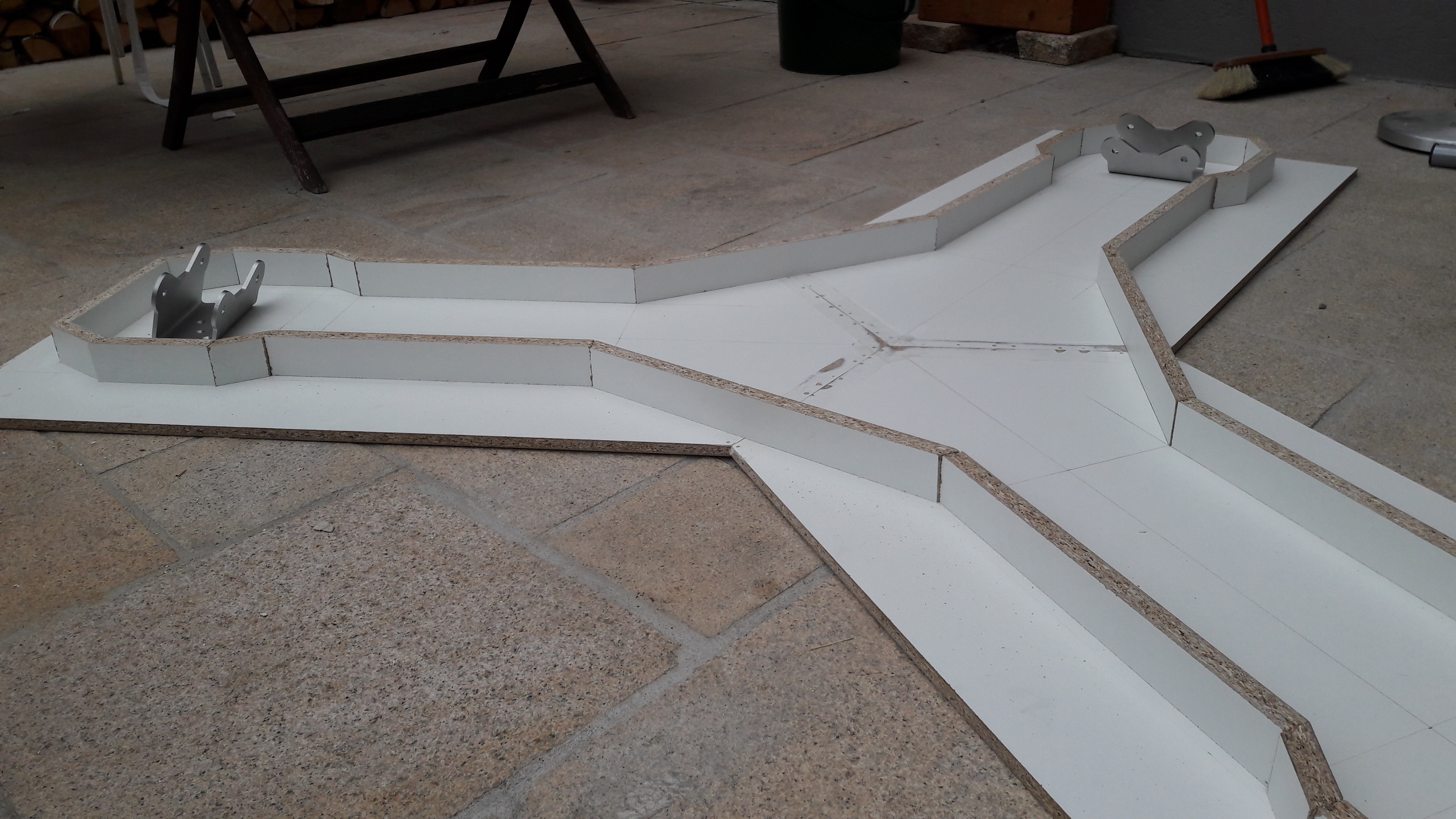
So we started to make a mould from wood and purchased cheap concrete for about 15,- € (for 90kg) - as it turned out it was too cheap !!! so during demoulding our base cracked. I also think we have been too unpatient and didnt wait long enough for hardening.
So we decided to build a new mold - and due to the lessons we learned so far, the second mold became much better than the first one.
Also this time the concrete we used was an expensive and special one that is usually used for making concrete furniture. The price was now 117,- (for 75kg). But believe me, it was worth all the money!
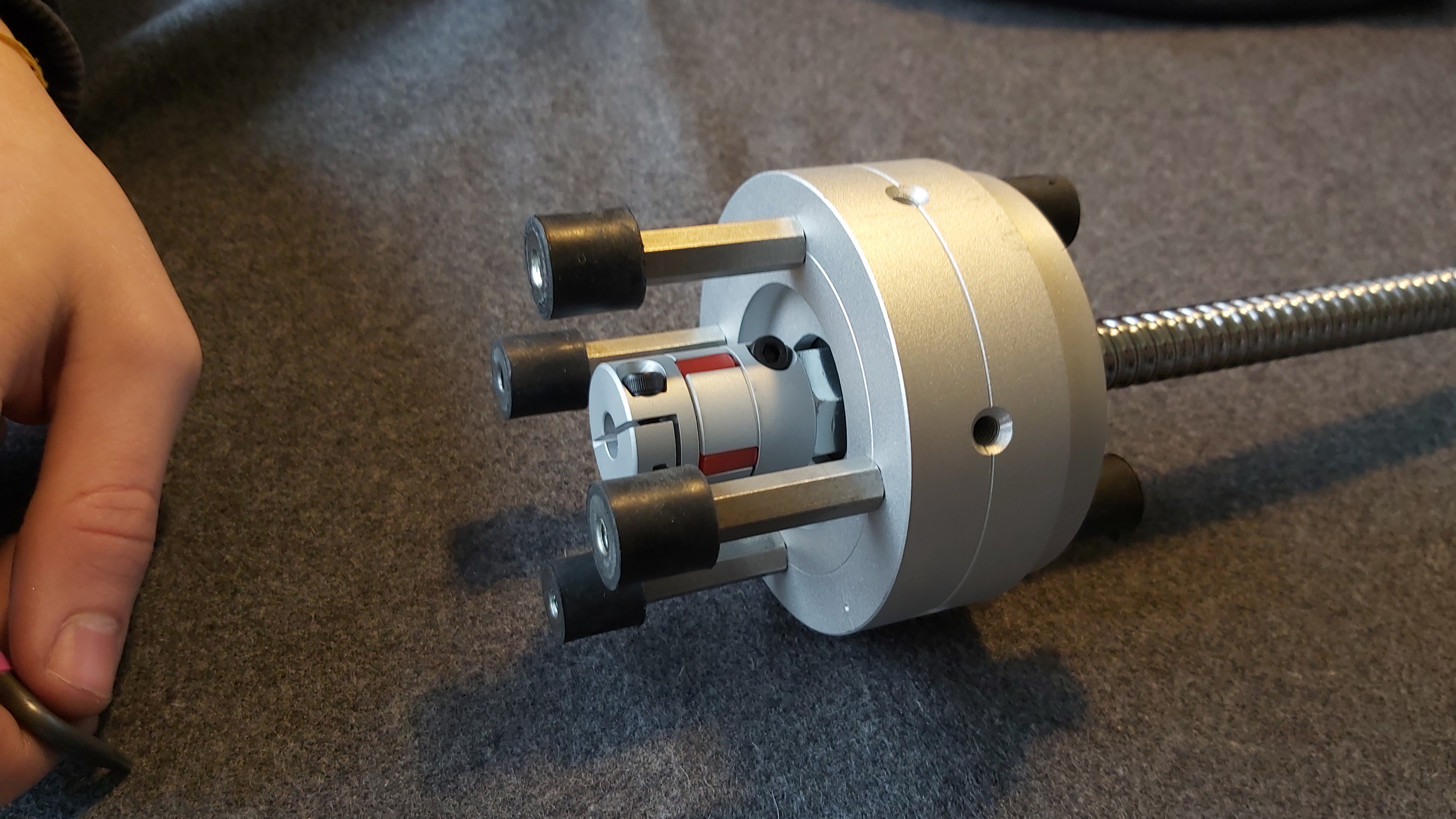
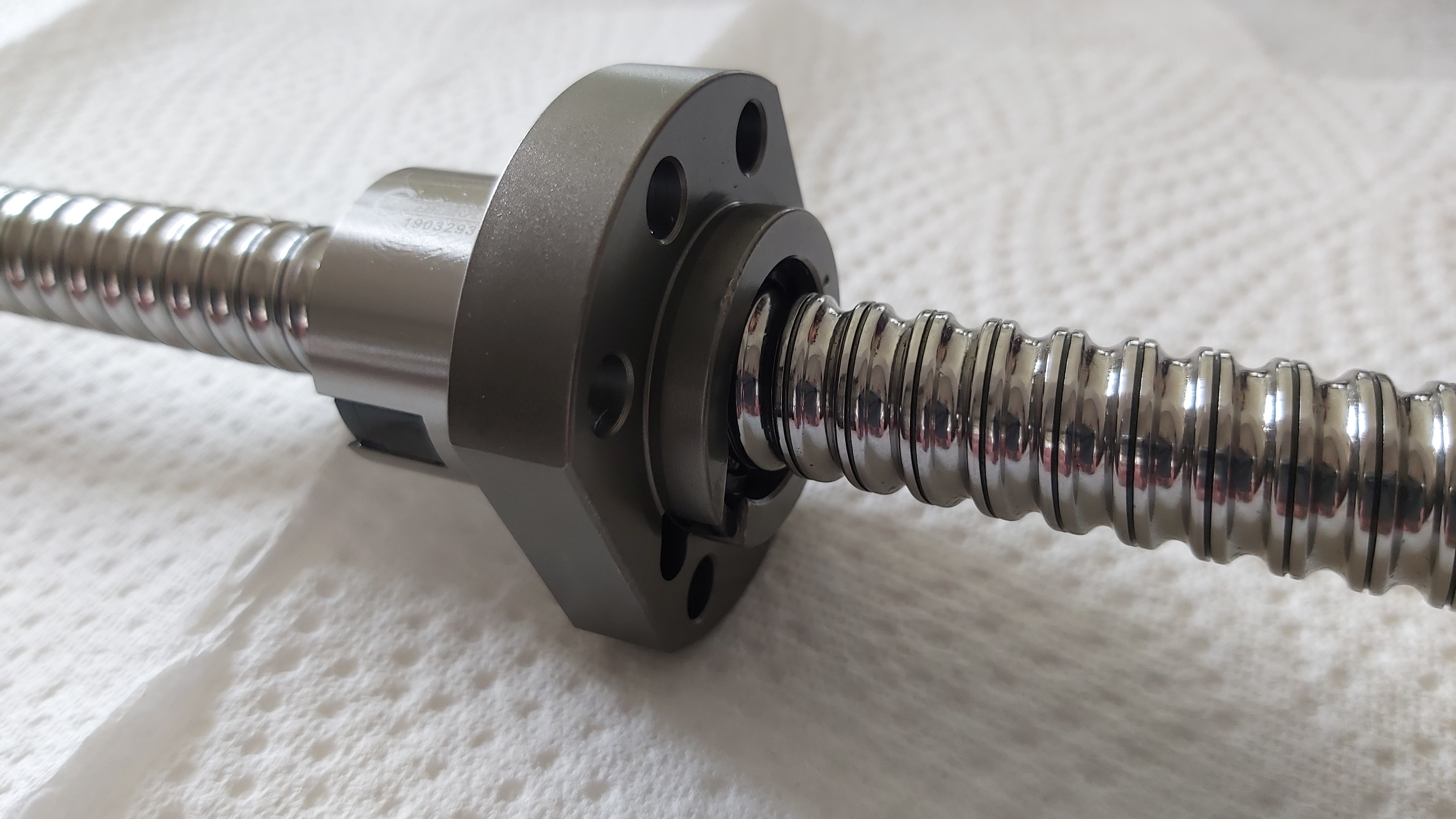
The shop where I bought the ballscrews is called Tuli ( [[https://www.tuli-shop.com/linear-mo...d-nuts/precision-ball-nuts/ball-nuts-sfh.html]
After the first attempt with cheap China ballscrews (which I had exchanged again because of the running noise), I finally decided for the 10 times (!!) more expensive quality ballscrews - hope they are worth their money and run quietly.
Since all parts of my actuators are almost finished, I think the final assembly of the actuators can be done in the next weeks! I am sooooo corious.
Hi guys
some little update on my project. Yesterday I finished the last parts of all my 6 actuators - really all! - I can tell you guys - it was a lot, lot of work! - I think it have been alone more than 200 threads to cut!
Today I gave the Zylinders some paint (same color than the later rubber-cover - RAL 7039).
Wickie
Hello Roiki1,
nice that you like my work!
Regarding the ethernet-serial bridges I have to admit, that I am a total rookie in software and electronic things. My focus was allways on the mechanical side.
But nevertheless thank you very much for the hint! I have looked a Youtube video about the ethernet and tried to understand. Maybe it will work.
When my motion-platform is running I will go back to the software topics and I would highly appreciate it when you could help me in case I will have problems wit the usb communication!
warm regards
Wickie
Hi all,
some update to my project:
This week, my son an me started the final assembly of the actuators. And I can tell you its such a good feeling to see the work growing and to see an end of the long tunnel
Today we also built a simple wooden upper frame, just to be able to fix the 6 actuators provisional on the base and see the first time the overall dimensons- I can tell you guys, the simulator is really really huge and looks somehow dominant in my living-room - (luckily I am already divorced - otherwise I would probably still have that in front of me now ).
Wickie


 .
.
















 ).
).