Hi!
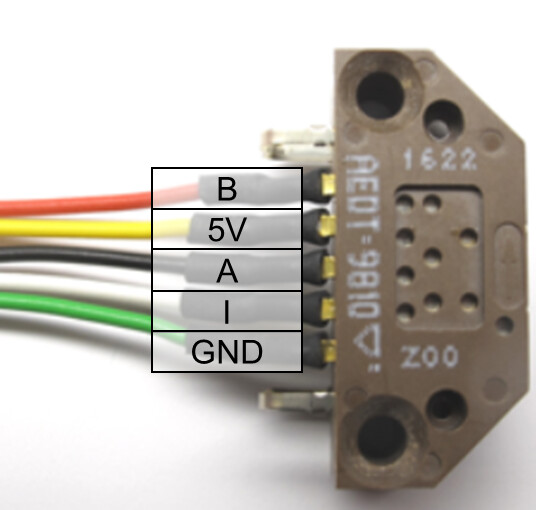
I cannot get the calibration work with ODrive 3.6 / 56V (original), Antigravity 4004 (Antigravity MN4004 KV300 - 2PCS/SET_Antigravity Type_Motors_Multirotor_T-MOTOR Store-Official Store for T-motor drone motor,ESC,Propeller) and the encoder AEDM-5810-Z12.
It is powered it with 14.8V (4S). When I start calibration I get
In [161]: dump_errors(odrv0)
system: no error
axis0
axis: no error
motor: Error(s):
MOTOR_ERROR_PHASE_RESISTANCE_OUT_OF_RANGE
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: no error
motor: no error
sensorless_estimator: no error
encoder: no error
controller: no error
This is my setting:
In [165]: odrv0.axis0.motor
Out[165]:
DC_calib_phA: 0.28591182827949524 (float)
DC_calib_phB: -0.49701595306396484 (float)
DC_calib_phC: 0.21123221516609192 (float)
I_bus: 0.0 (float)
config:
I_bus_hard_max: inf (float)
I_bus_hard_min: -inf (float)
I_leak_max: 0.10000000149011612 (float)
R_wL_FF_enable: False (bool)
acim_autoflux_attack_gain: 10.0 (float)
acim_autoflux_decay_gain: 1.0 (float)
acim_autoflux_enable: False (bool)
acim_autoflux_min_Id: 10.0 (float)
acim_gain_min_flux: 10.0 (float)
bEMF_FF_enable: False (bool)
calibration_current: 10.0 (float)
current_control_bandwidth: 1000.0 (float)
current_lim: 10.0 (float)
current_lim_margin: 8.0 (float)
dc_calib_tau: 0.20000000298023224 (float)
inverter_temp_limit_lower: 100.0 (float)
inverter_temp_limit_upper: 120.0 (float)
motor_type: 0 (uint8)
phase_inductance: 0.0 (float)
phase_resistance: 0.0 (float)
pole_pairs: 12 (int32)
pre_calibrated: False (bool)
requested_current_range: 60.0 (float)
resistance_calib_max_voltage: 2.0 (float)
torque_constant: 0.027566665783524513 (float)
torque_lim: inf (float)
current_control:
I_measured_report_filter_k: 1.0 (float)
Ialpha_measured: 0.0 (float)
Ibeta_measured: 0.0 (float)
Id_measured: 0.0 (float)
Id_setpoint: 0.0 (float)
Iq_measured: 0.0 (float)
Iq_setpoint: 0.0 (float)
Vd_setpoint: 0.0 (float)
Vq_setpoint: 0.0 (float)
final_v_alpha: 0.0 (float)
final_v_beta: 0.0 (float)
i_gain: nan (float)
p_gain: 0.0 (float)
phase: 0.0 (float)
phase_vel: 0.0 (float)
power: 0.0 (float)
v_current_control_integral_d: 0.0 (float)
v_current_control_integral_q: 0.0 (float)
current_meas_phA: -0.2879217863082886 (float)
current_meas_phB: 0.49901485443115234 (float)
current_meas_phC: -0.2115287184715271 (float)
effective_current_lim: 10.0 (float)
error: 0 (uint64)
fet_thermistor:
config: …
temperature: 26.77530288696289 (float)
is_armed: False (bool)
is_calibrated: False (bool)
last_error_time: 0.0 (float)
max_allowed_current: 60.75 (float)
max_dc_calib: 6.075000286102295 (float)
motor_thermistor:
config: …
temperature: 0.0 (float)
n_evt_current_measurement: 29945 (uint32)
n_evt_pwm_update: 29950 (uint32)
phase_current_rev_gain: 0.02500000037252903 (float)
and I configured it like this:
odrv0.erase_configuration()
odrv0.axis0.motor.config.current_lim = 10
odrv0.config.enable_brake_resistor = True
odrv0.config.brake_resistance = 2
odrv0.axis0.motor.config.pole_pairs = 12
odrv0.axis0.motor.config.torque_constant = 8.27 / 300
odrv0.axis0.motor.config.motor_type = MOTOR_TYPE_HIGH_CURRENT
odrv0.axis0.encoder.config.cpr=5000
odrv0.save_configuration()
Please help!
Best,
Jochen