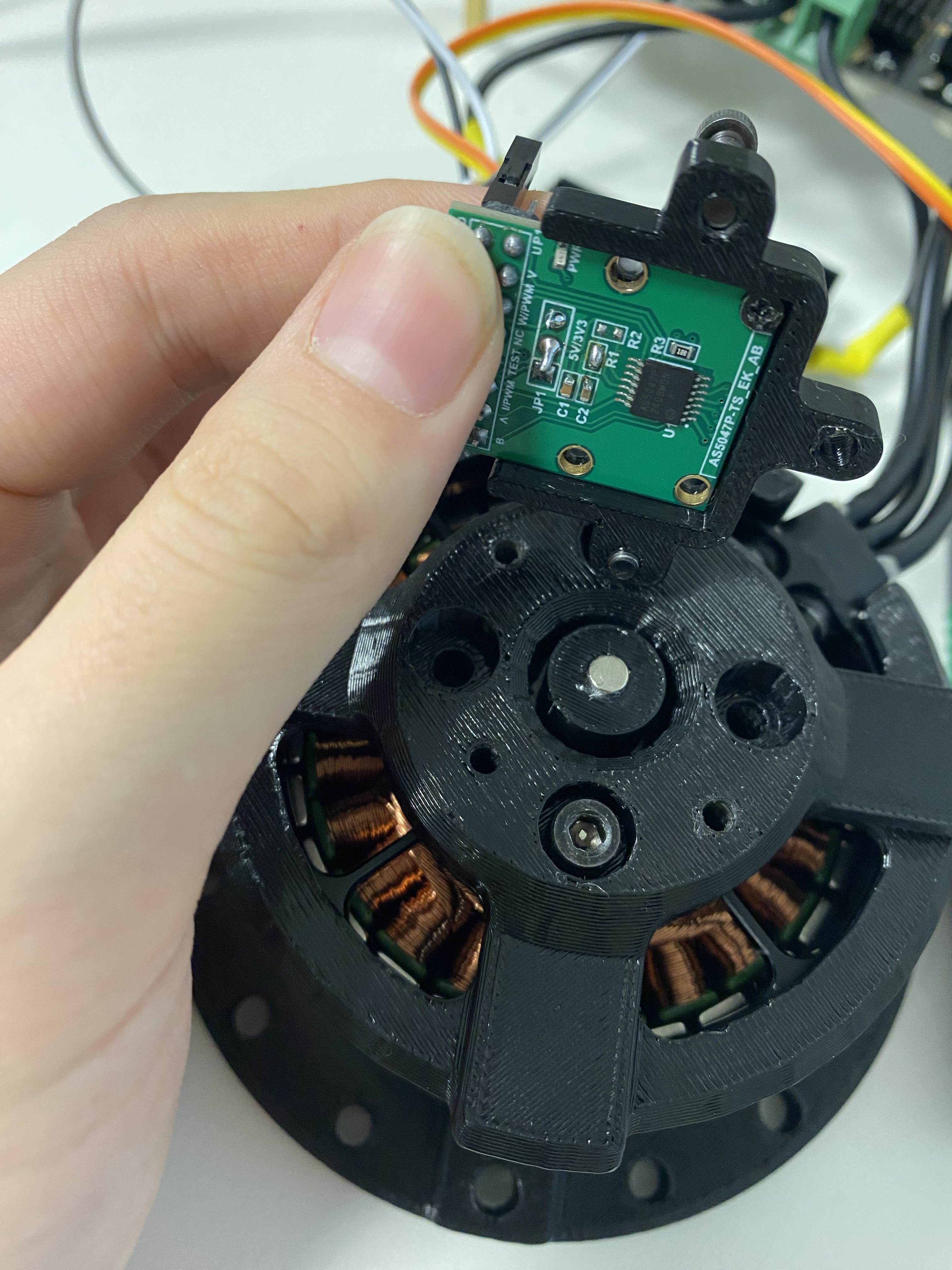
Hello again,
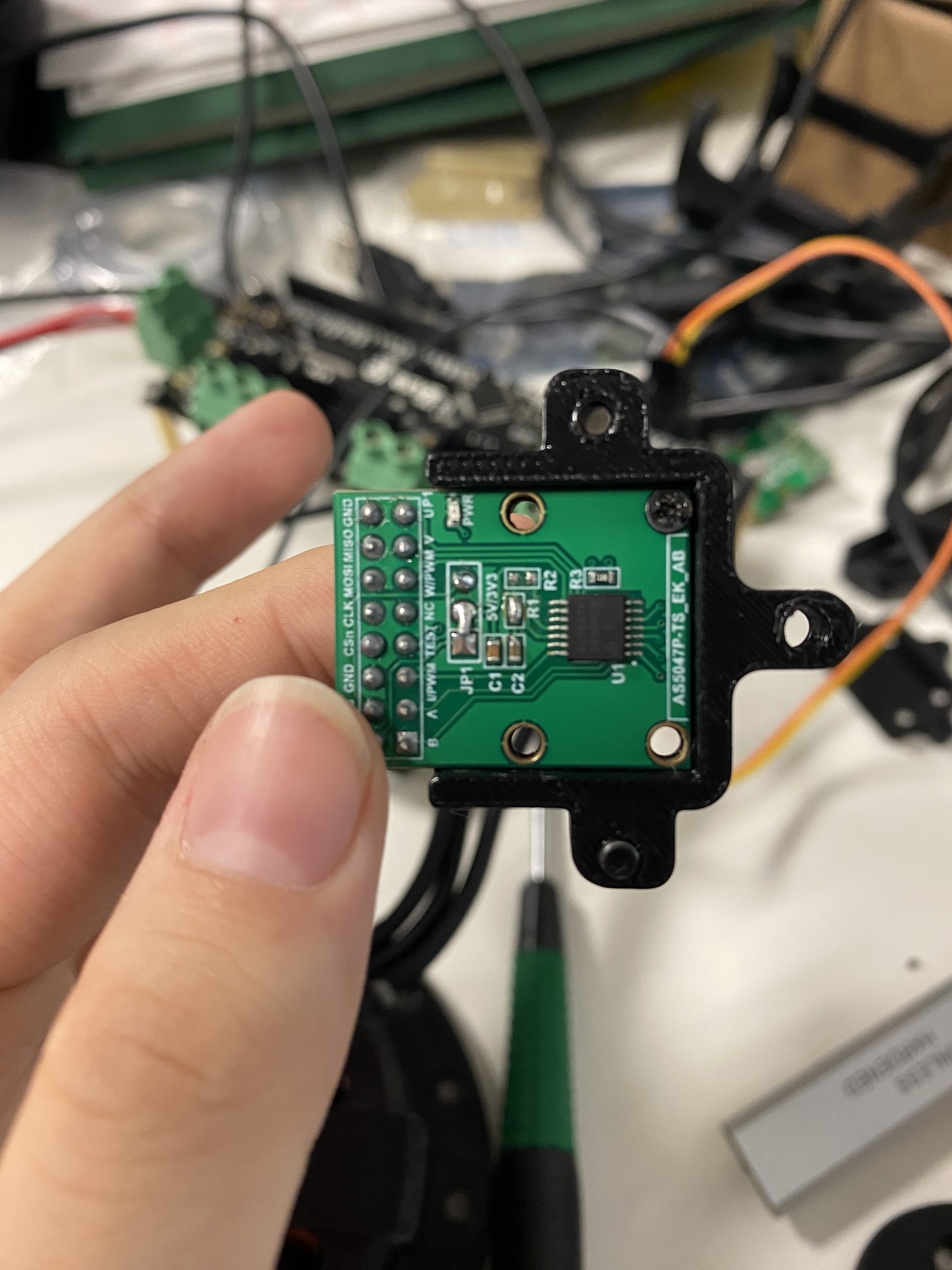
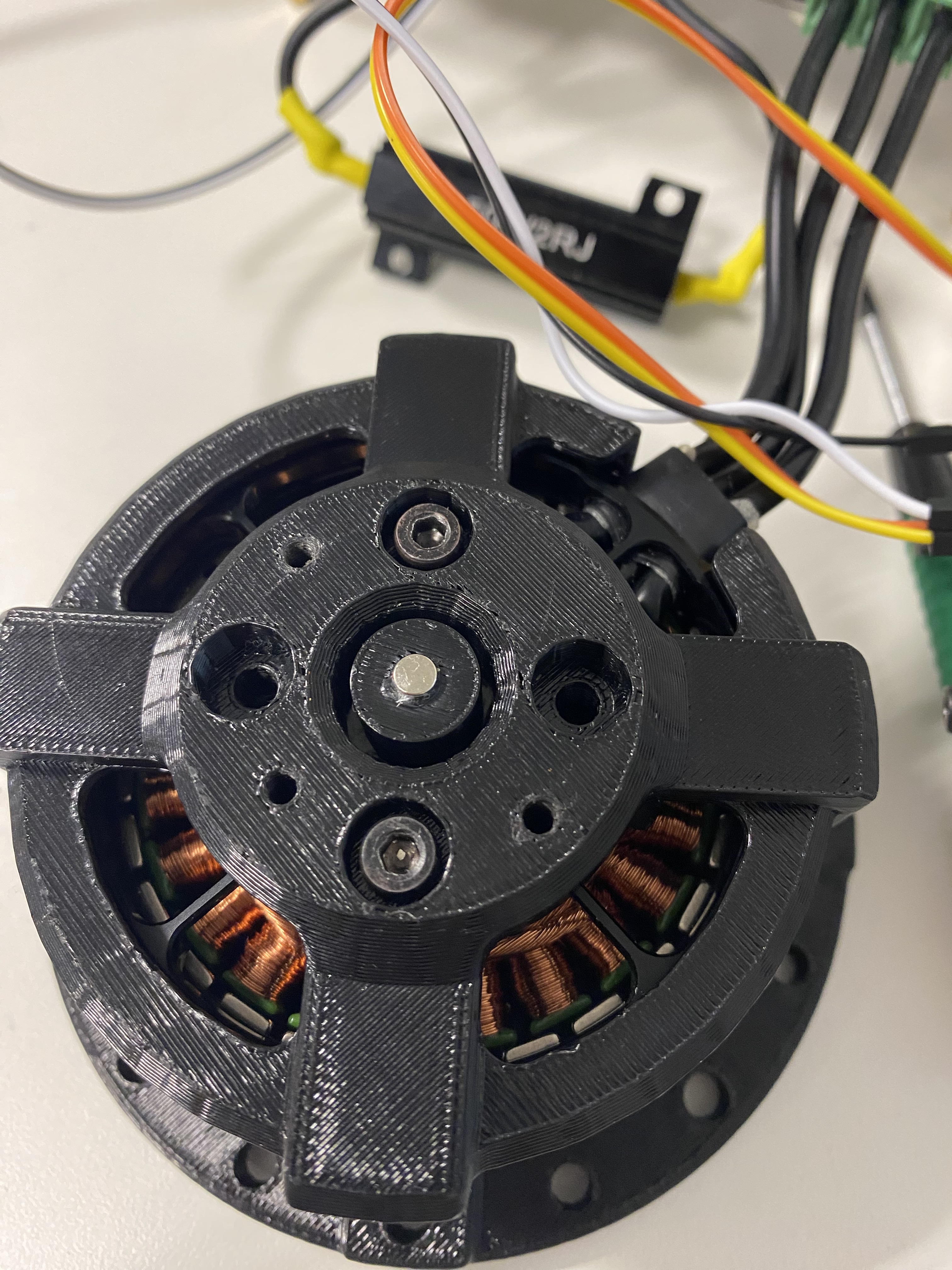
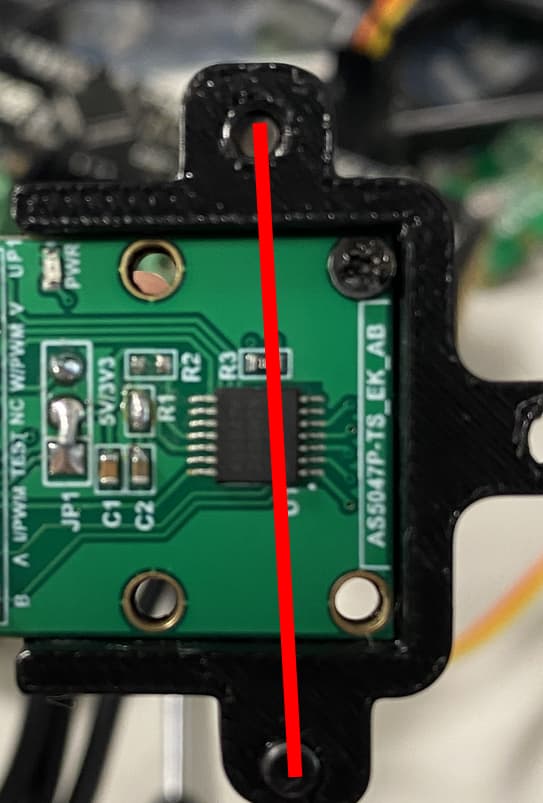
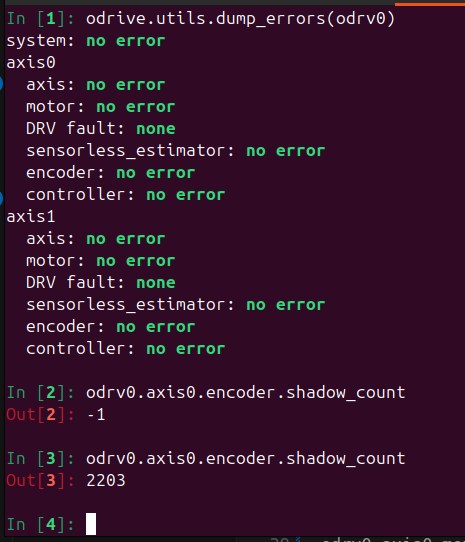
I am connecting encoder with AB connection. I am calibrating motor, then encoder, then doing full calibration. After that there is no error. The cpr value is 2000. Then I am putting ‘odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL’. When I try to give an position input motor behave strangely (vibrates) and gives error: “MotorError.CURRENT_LIMIT_VIOLATION”. You can see it here: video
I do not believe that there is an mistake with vel_gain or pos_gain. Because I tried to set them to 0, the error still presents.
My code:
import odrive
import time
import math
from odrive.enums import *
odrv0 = odrive.find_any()
print(str(odrv0.vbus_voltage))
print("Erasing pre-exsisting configuration...")
try:
odrv0.erase_configuration()
except Exception:
pass
odrv0 = odrive.find_any()
time.sleep(5)
odrv0.config.enable_brake_resistor = True
odrv0.config.brake_resistance = 2.0
odrv0.config.dc_max_positive_current = 30
odrv0.config.dc_max_negative_current = -1
odrv0.config.max_regen_current = 0 #(usually 0)
odrv0.config.dc_bus_undervoltage_trip_level = 8.0
odrv0.config.dc_bus_overvoltage_trip_level = 26 #(the max current that the Odrive can handle)
odrv0.axis0.config.calibration_lockin.current = 20
#motor config
odrv0.axis0.motor.config.motor_type = odrive.utils.MotorType.HIGH_CURRENT
odrv0.axis0.motor.config.current_lim = 68
odrv0.axis0.motor.config.pole_pairs = 14
odrv0.axis0.motor.config.calibration_current = 10
odrv0.axis0.motor.config.resistance_calib_max_voltage = 2
odrv0.axis0.motor.config.requested_current_range = 20
odrv0.axis0.motor.config.torque_constant = 8.27 / 340
odrv0.axis0.motor.config.current_control_bandwidth = 500
#controller config
odrv0.axis0.controller.config.pos_gain = 20
odrv0.axis0.controller.config.vel_gain = 0.02
odrv0.axis0.controller.config.vel_integrator_gain = 0.1
odrv0.axis0.controller.config.control_mode = CONTROL_MODE_POSITION_CONTROL
odrv0.axis0.controller.config.vel_limit = 20
odrv0.axis0.controller.config.input_mode = INPUT_MODE_TRAP_TRAJ
odrv0.axis0.trap_traj.config.vel_limit = 30
odrv0.axis0.trap_traj.config.accel_limit = 5
odrv0.axis0.trap_traj.config.decel_limit = 5
odrv0.axis0.requested_state = AXIS_STATE_IDLE
try:
odrv0.save_configuration()
except:
pass
odrv0 = odrive.find_any()
odrv0.axis0.requested_state = AXIS_STATE_MOTOR_CALIBRATION
time.sleep(10)
odrv0.axis0.motor.config.pre_calibrated = True
print(str(odrive.utils.dump_errors(odrv0)))
print('Motor Calibrated')
odrv0.axis0.encoder.config.mode = ENCODER_MODE_INCREMENTAL
odrv0.axis0.encoder.config.cpr = 2000
odrv0.axis0.encoder.config.calib_range = 0.05
odrv0.axis0.encoder.config.bandwidth = 3000
odrv0.axis0.encoder.config.use_index = False
odrv0.axis0.encoder.config.pre_calibrated=False
odrv0.axis0.requested_state = AXIS_STATE_IDLE
try:
odrv0.save_configuration()
except:
pass
odrv0 = odrive.find_any()
odrv0.axis0.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION
odrv0.axis0.encoder.config.pre_calibrated = True
time.sleep(10)
print(str(odrive.utils.dump_errors(odrv0)))
print('Encoder Calibrated')
odrv0.axis0.requested_state = AXIS_STATE_IDLE
try:
odrv0.save_configuration()
except:
print('Config saved')
odrv0 = odrive.find_any()
odrv0.axis0.encoder.config.pre_calibrated=False
odrv0.axis0.motor.config.pre_calibrated=False
odrv0.axis0.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
odrv0.axis0.encoder.config.pre_calibrated=True
odrv0.axis0.motor.config.pre_calibrated=True
time.sleep(15)
print(str(odrive.utils.dump_errors(odrv0)))
print('Full Calibration Sequence')
odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL #odrive.utils.AxisState.SENSORLESS_CONTROL
time.sleep(5)
print(str(odrive.utils.dump_errors(odrv0)))