Hello Odrive Community,
I have two of these motors connected to 56V version of Odrive 3.6
Motors: 13 inch single shaft tractor tire geared wheelbarrow motor - UU Motor
I was able to calibrate the motors and get to RC PWM control. I added 47 nf caps, noise chokes and twisted the wires. I belive I don’t have a ground loop.
I am using 36V 10S3P 10AH battery for powering up Odrive.
Right after I sent input_vel values, axis1 goes into error state as below:
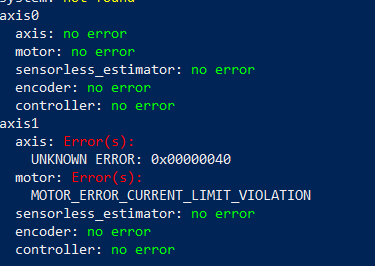
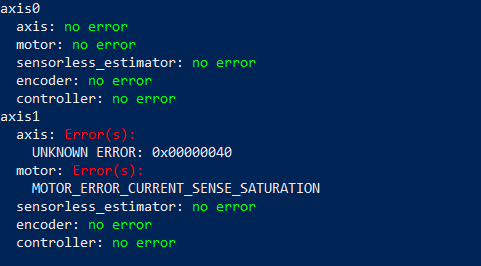
As I adjusted the current lim margin, axis 1 throws SENSE SATURATION ERROR
This issue happens only on Axis 1, specifically when Axis0 motor changes direction or speed. With RC PWM input, it happens from the get go on Axis 1 sometimes and sometimes a few second after the wheel spins.
At this point I don’t know what to do about this issue and would appreciate your inputs and help greatly.
TIA