Hey Everyone!
I am so excited to start using ODrive in my robotics project to build a “Biomimetic Robotic Thumb.”
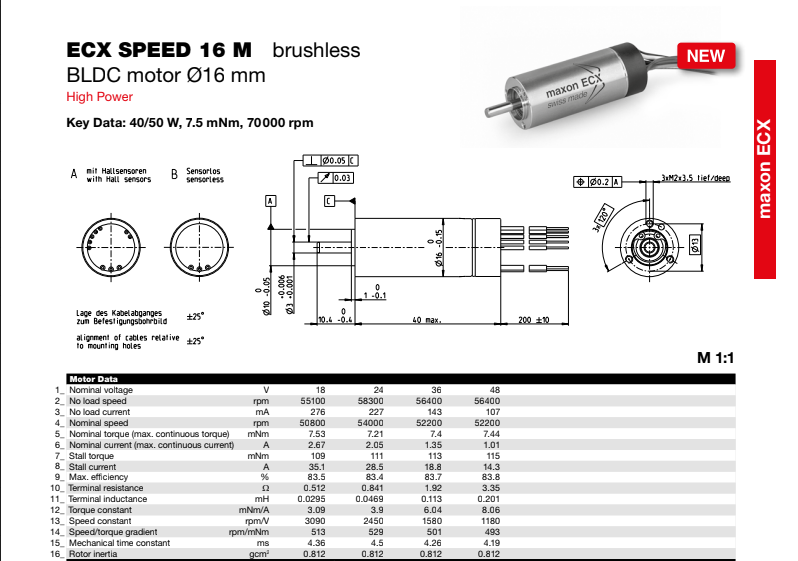
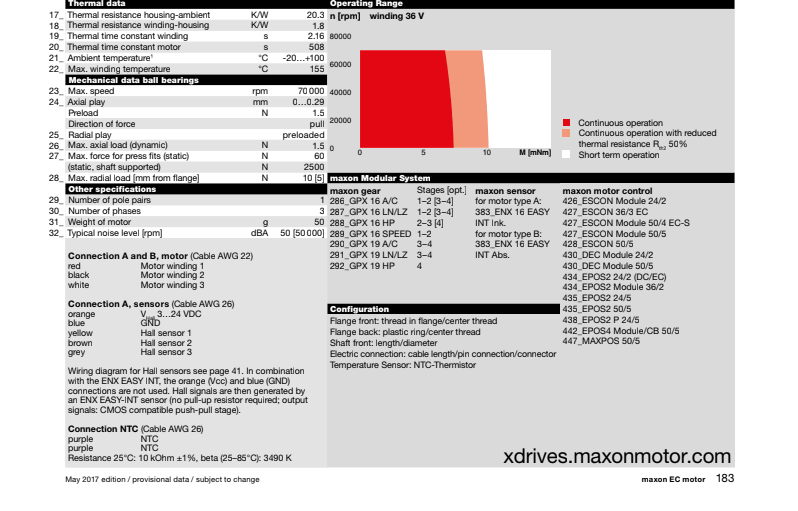
Towards this goal, I’ve purchased a high-speed brushless motor to be placed inside one phalanx of the thumb. The nominal no-load speed is 70k RPM (as shown in spec sheet below)
The motor is rated for very high speeds, so I plan to have a planetary reduction on it, somewhere between 1:87 and 1:356 ratio depending on my final design choices.
I would really appreciate help getting started! I followed the standard procedure in the docs for calibrating the motor, but it would only twitch, then throw an 0x0011 error, which I couldn’t identify, but made me realize my odrive firmware wasn’t quite up to date. I am working on flashing it now and will update progress.
Since the motor incorporates hall sensors, I thought I’d use them as a low-resolution encoder, following this guide from the docs:
https://docs.odriverobotics.com/hoverboard.html
The result is still similar, the motor only twitches. I’m trying to set the values to be more appropriate to my small motor than the huge hoverboard ones, plus it only has 1 pole pair, so any help with these values is greatly appreciated.
Here is the motor spec sheet:
I will update soon, repeating these attempts once I have a properly installed firmware development environment (vscode) and can compile the latest firmware from there. Any comments on the overall feasibility of the design or help getting started with the motor calibration are greatly appreciated!
Thanks