Hello Everybody!
I have just received 3 odrives and can not wait to get everything up and running.
The encoders are still in transit so, for now, I want to test out sensor-less mode.
My goal is to run 4 motors, position controlled simultaneously.
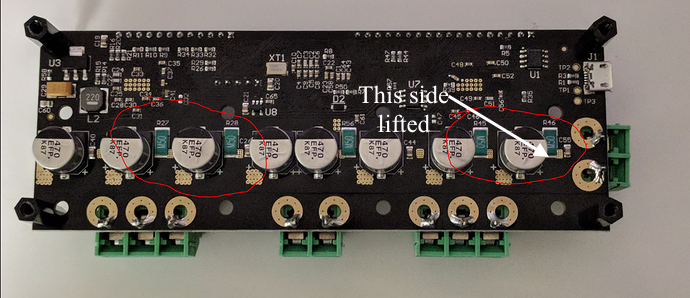
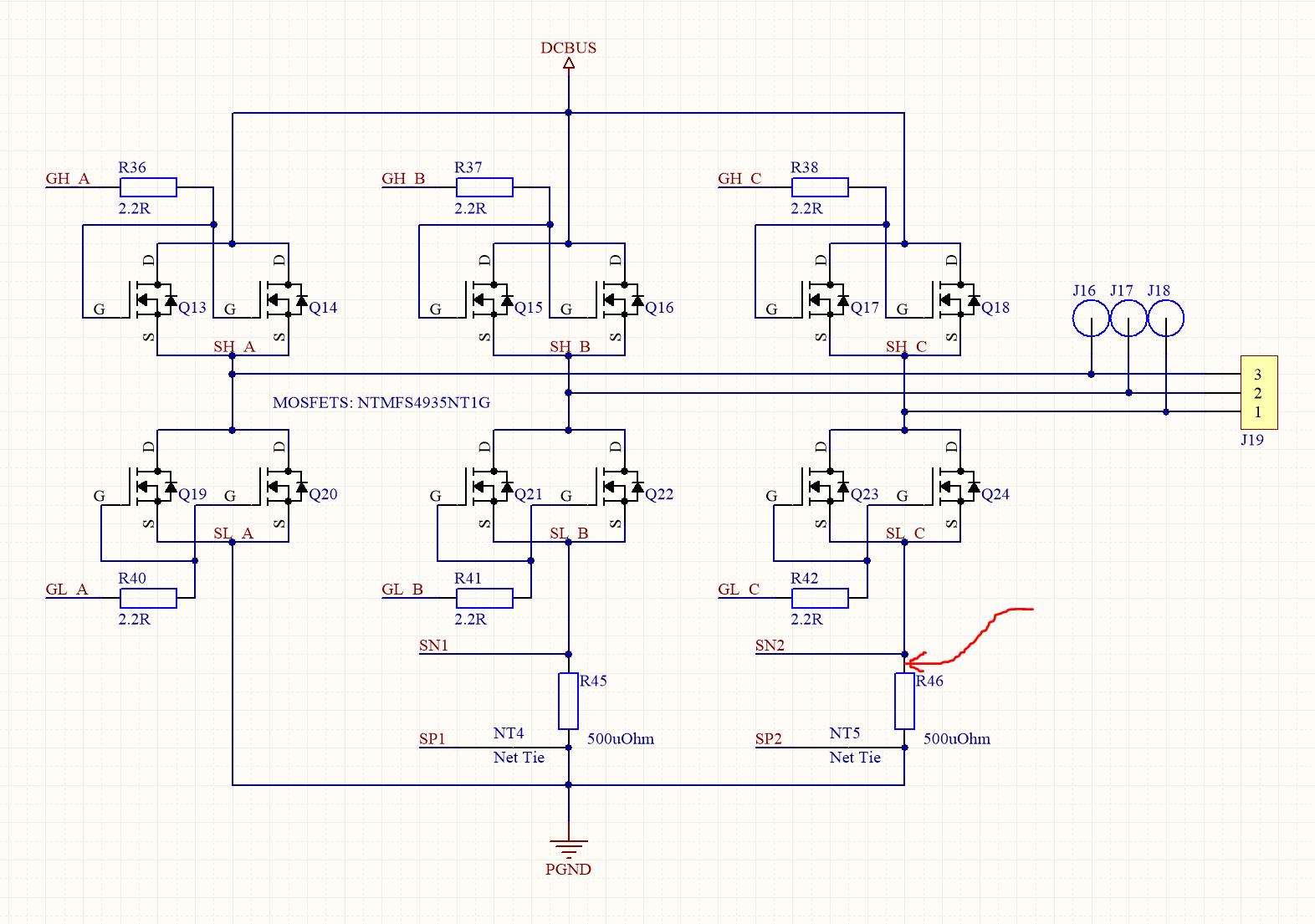
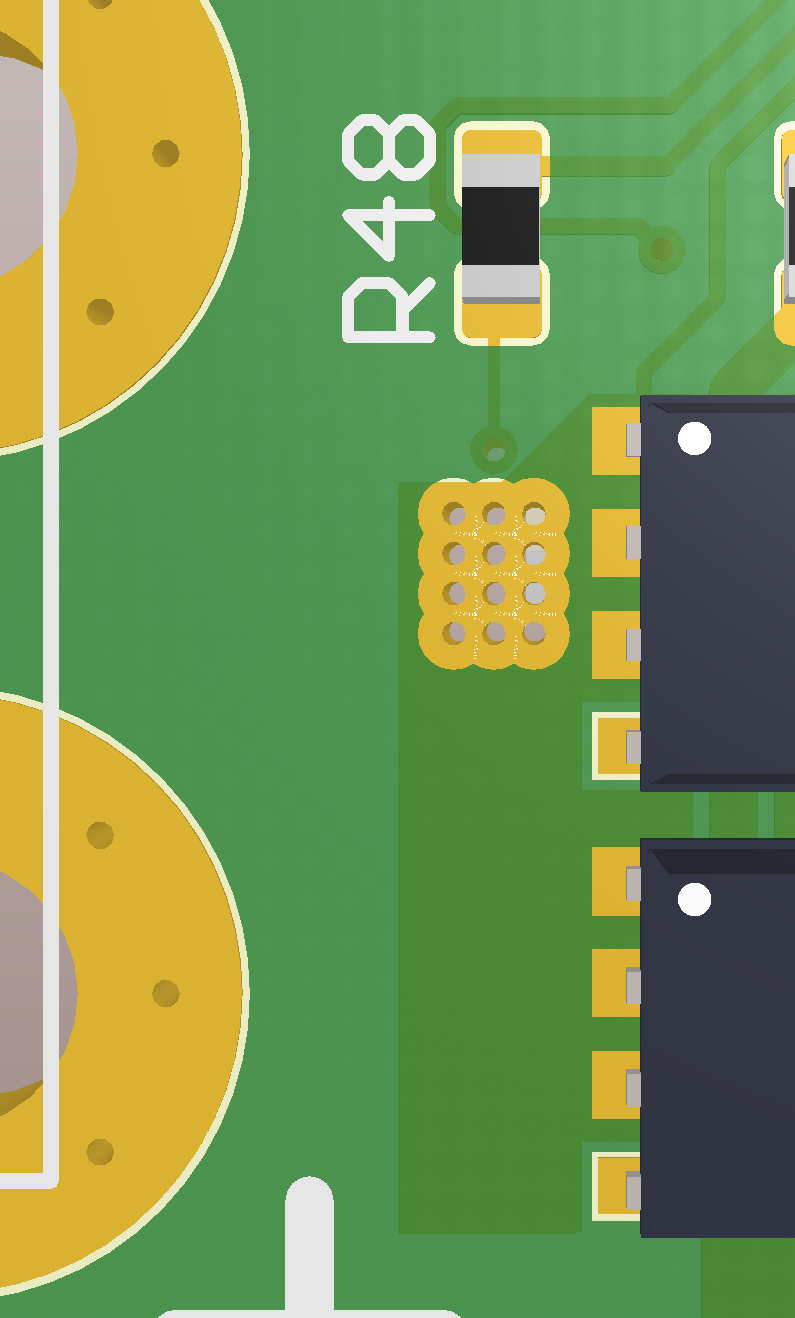
I have been in contact with Oskar before my purchase and he suggested that I changed the current sensing resistors due to the low current draw of my motors
Can someone tell me which resistor I would need to change and what would be an appropriate value for these motors?
Met vriendelijke groet,
Bastiaan