Hi. I’m a huge fan of odrive and Hope you to enjoy odrive long time.
I was decided to graduate my odrive with USB, 20 days ago.
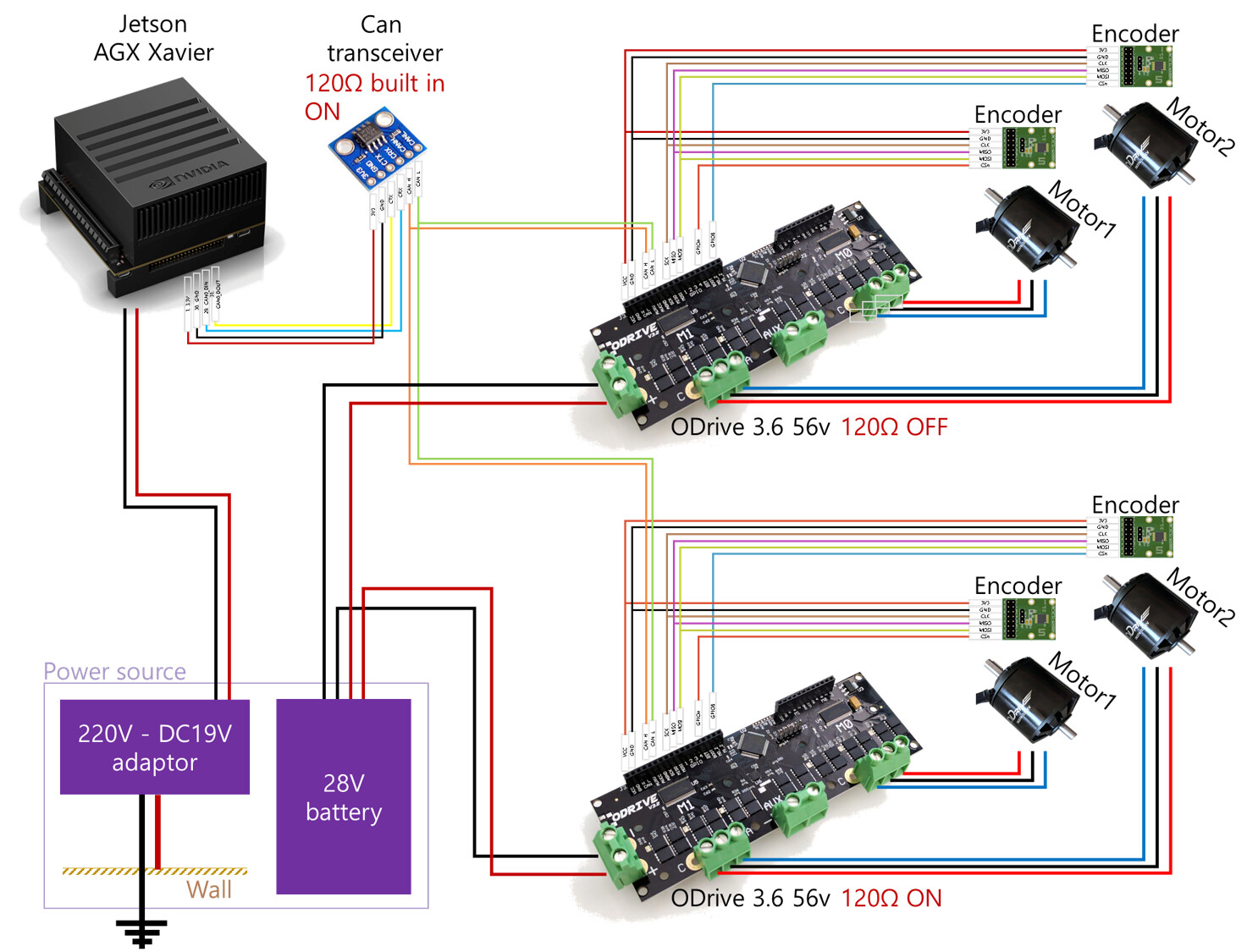
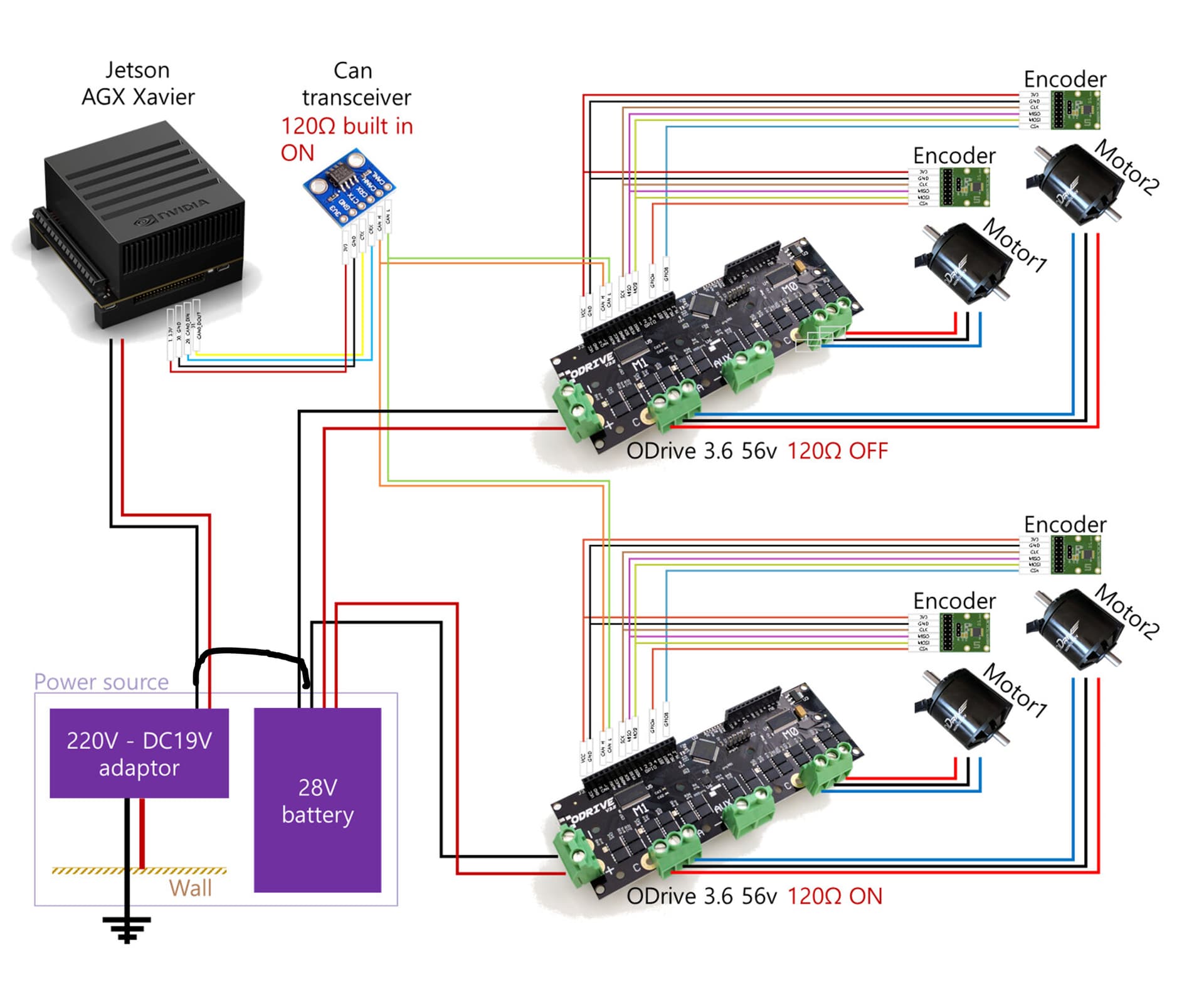
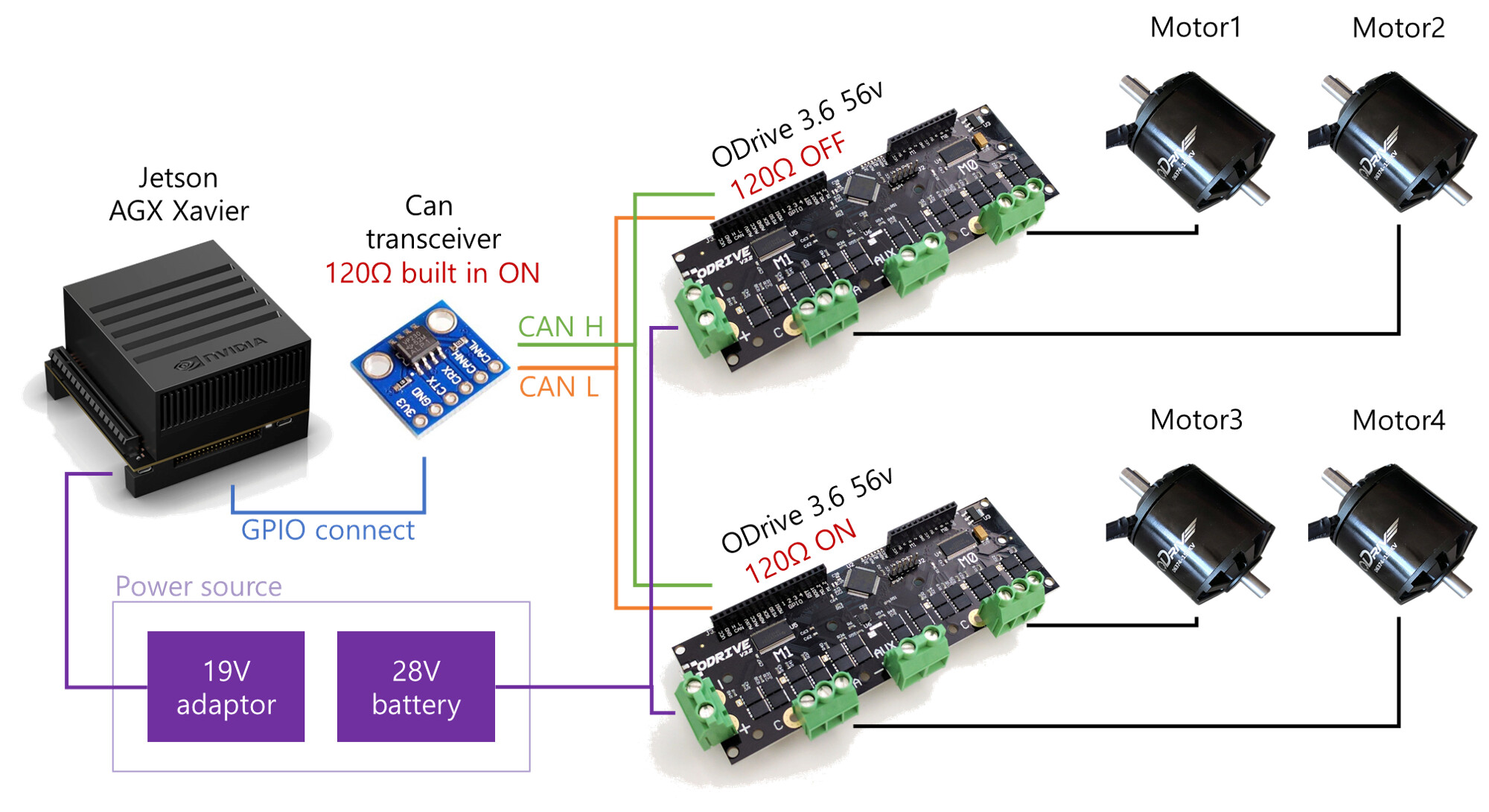
I was trying to connect four motors using CAN BUS. The system consists of two Odrives.
I am having trouble connecting to CAN bus.
I have already burned several ODrives.
The equipments I use to connect are below.
1 Jetson AGX Xavier
2 SN65HVD230 CAN transceiver
3 Odrive 3.6 56v * 2
4 AC220v-DC19v inverter
5 24v battery The agx is powered by an AC 220V-dc 19V adapter.
The Odrive is powered by a DC 28V battery.
I referred to the site in the link below, and a CAN Transceiver was connected for CAN bus communication with agx.
The CAN transceiver has a built-in 120Ω terminating resistor.
So I turned off the terminating resistor of one of the two Odrives, and then connected it to the circuit.
(When I measured the CAN resistance, 60Ω was measured.)
The motor operates normally when one ODrive and AGX are connected.
When the motor was driven with two Odrive and transceiver connected, the Odrive with the resistor on burned out.
I have tested both of the Odrives with the terminating resistor turned on.
At that time, both Odrives burned down. The CAN chipset area was burned.
I don’t want to burn Odrive anymore.
I need help. Thank you in advance for anyone who will help me.
picture 1. the circuit.
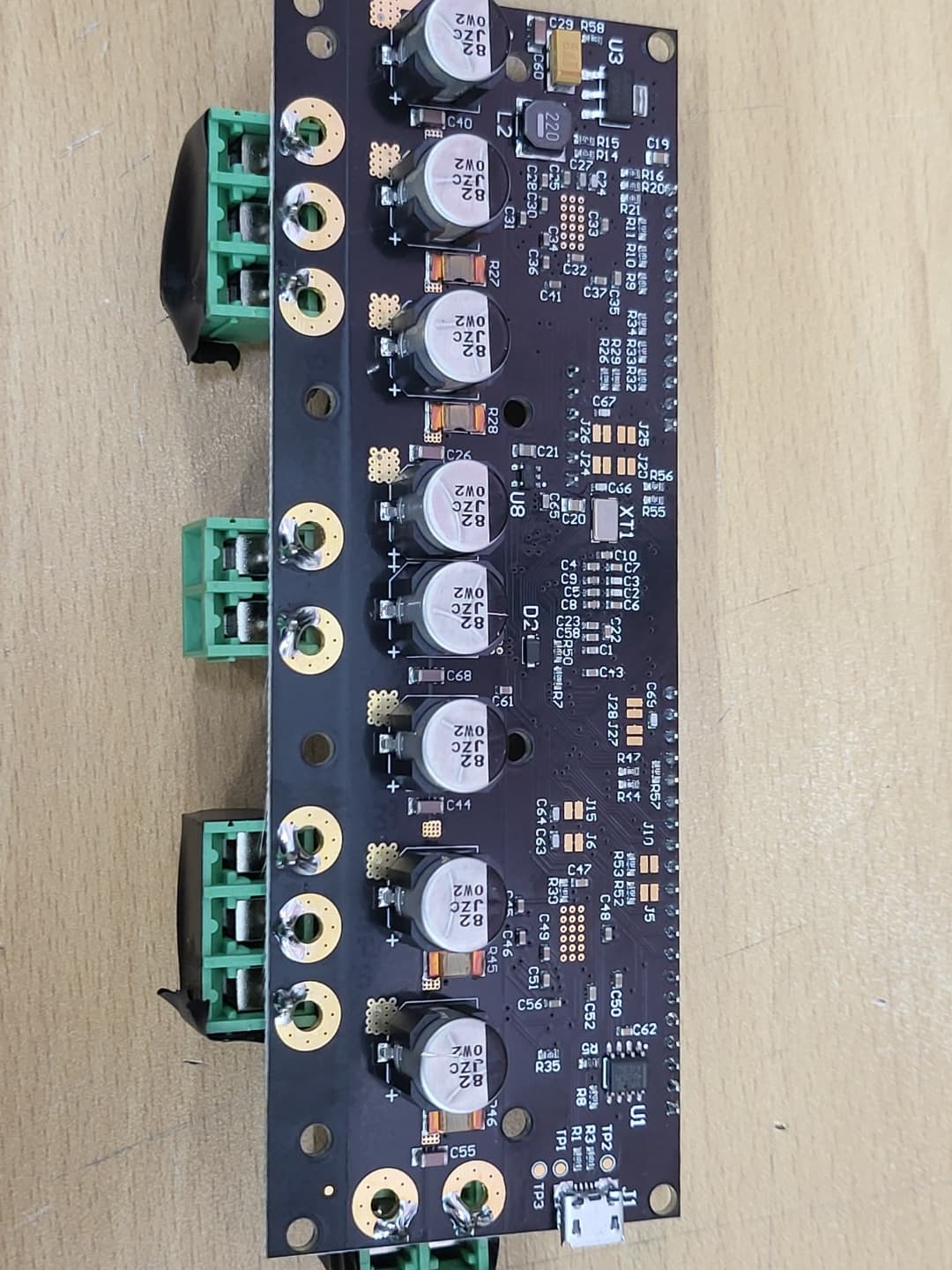
picture 2. odrive holocaust tower
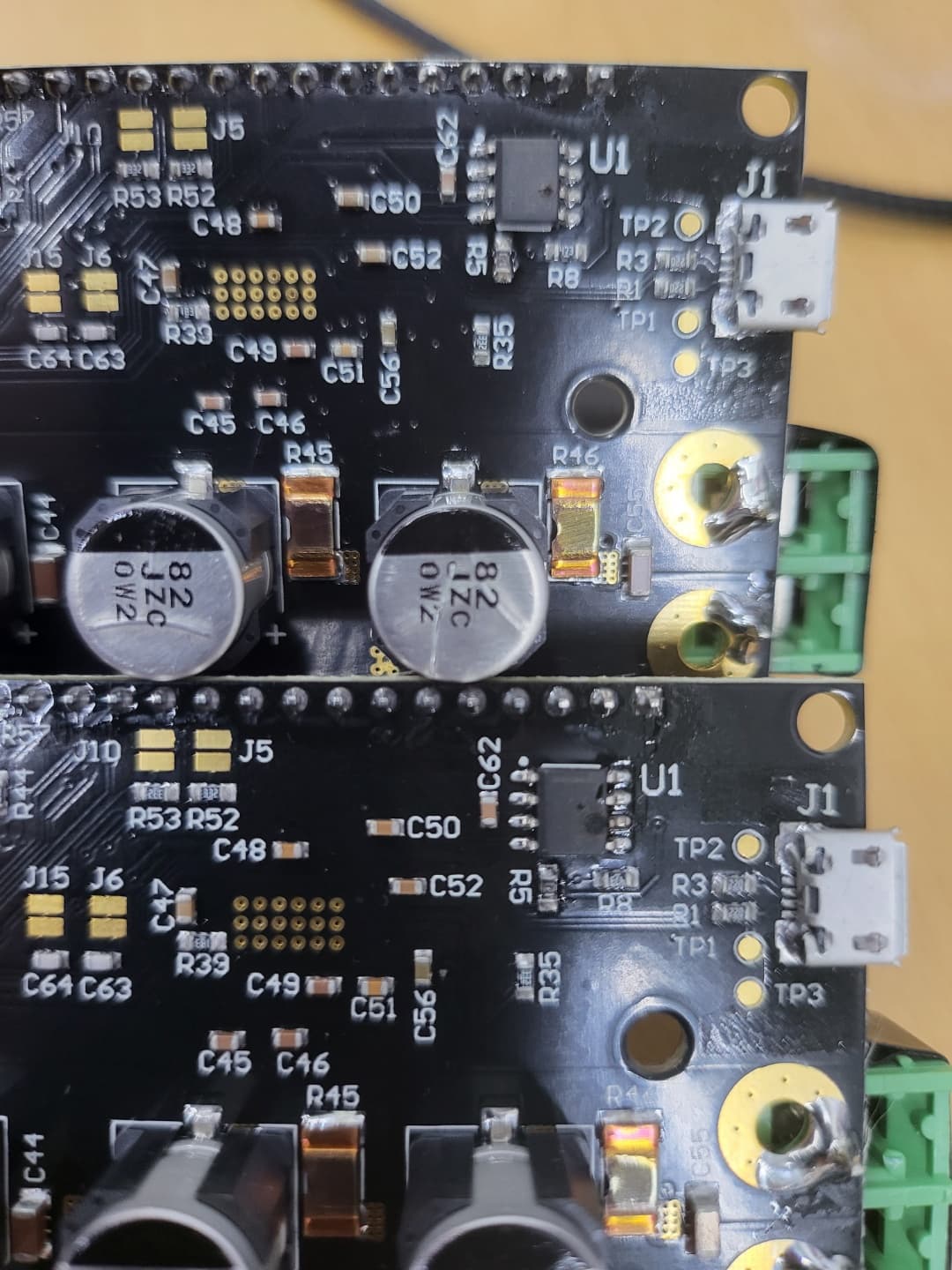
picture 3. one of the chipset

picture 4. one of the odrive