takijo
February 18, 2021, 12:15am
1
Hi, I struggle to run a brushed motor with ODrive.
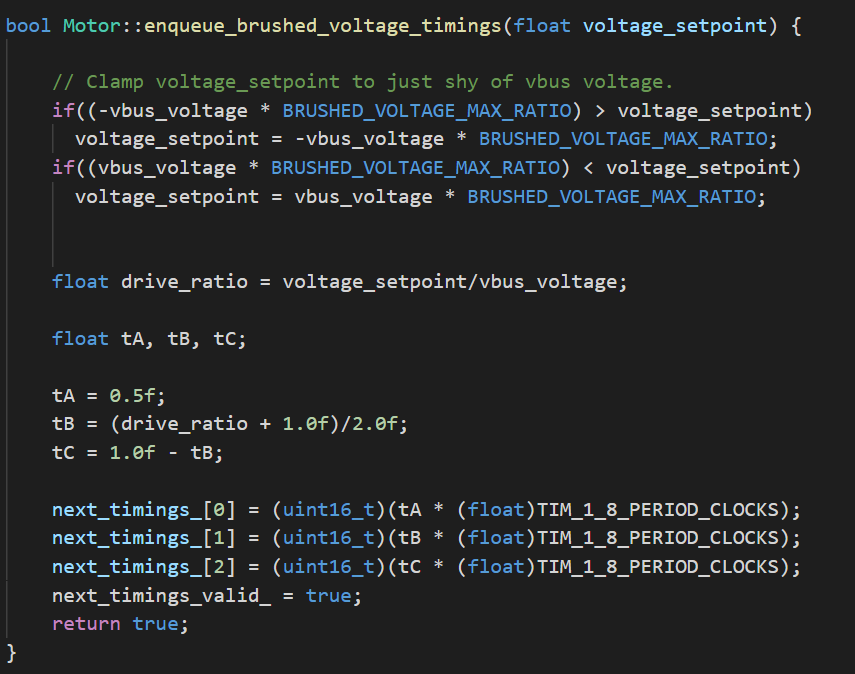
I add a function to run brushed motor in motor.cpp.
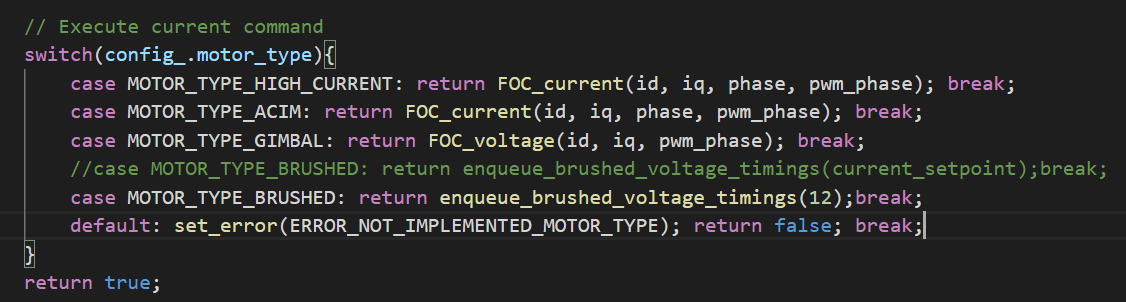
I can run brushed motor if I set torque_setpoint directly(set as “12” in below picture).
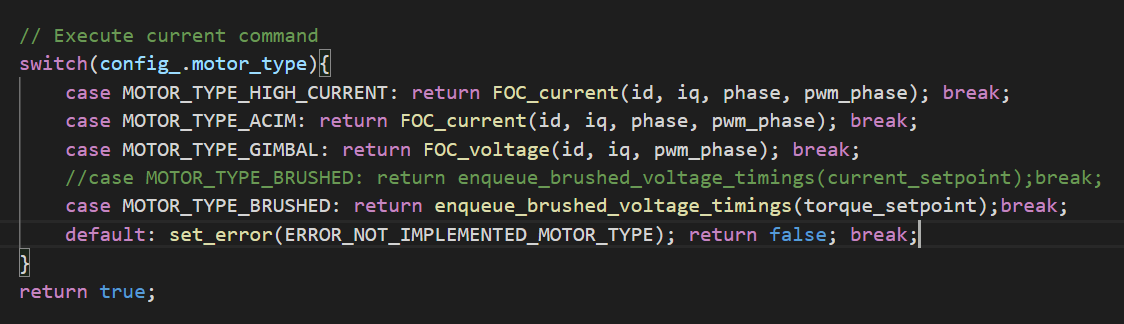
But, I cannot do that if I set torque_setpoint through controller.
odrv0.axis0.controller.input_torque=12;
What is the problem?
My ODrive configuration is below.
odrv0.axis0.controller.config.control_mode = CONTROL_MODE_TORQUE_CONTROL;
odrv0.axis0.controller.config.input_mode = INPUT_MODE_PASSTHROUGH;
regard.
takijo
February 19, 2021, 2:55pm
2
Sorry, I had set vel_lim and torque_lim very small.
It works now.
1 Like
Awesome! Can you submit a pull request to the github?
takijo
February 21, 2021, 3:45am
4
OK, I submit a pull request after refactoring.
My code is made from this one.
Hello!
I have an application that requires control of one brushless motor and one brushed motor. I’ve already got an Odrive V3.6 driving the brushless motor, but I see that brushed motors don’t appear to be part of the software. I’m familiar with embedded C/C++ programming and github pull requests.
Would anyone be able to generally advise me on what would need to change? Commutation is easy, but I suppose auto-identification may need to change.
If someone could point me in the right direction…
1 Like
takijo
February 25, 2021, 3:46pm
5
@Wetmelon
My code supports torque,velocity,and position cotrol in closed loop.
odrv0.axis0.motor.config.motor_type = MOTOR_TYPE_BRUSHED
odrv0.axis0.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
and you can set the setpoint you like.
If not work well ,please tune PID gain.
2 Likes
This is great, I can’t wait to check it out!