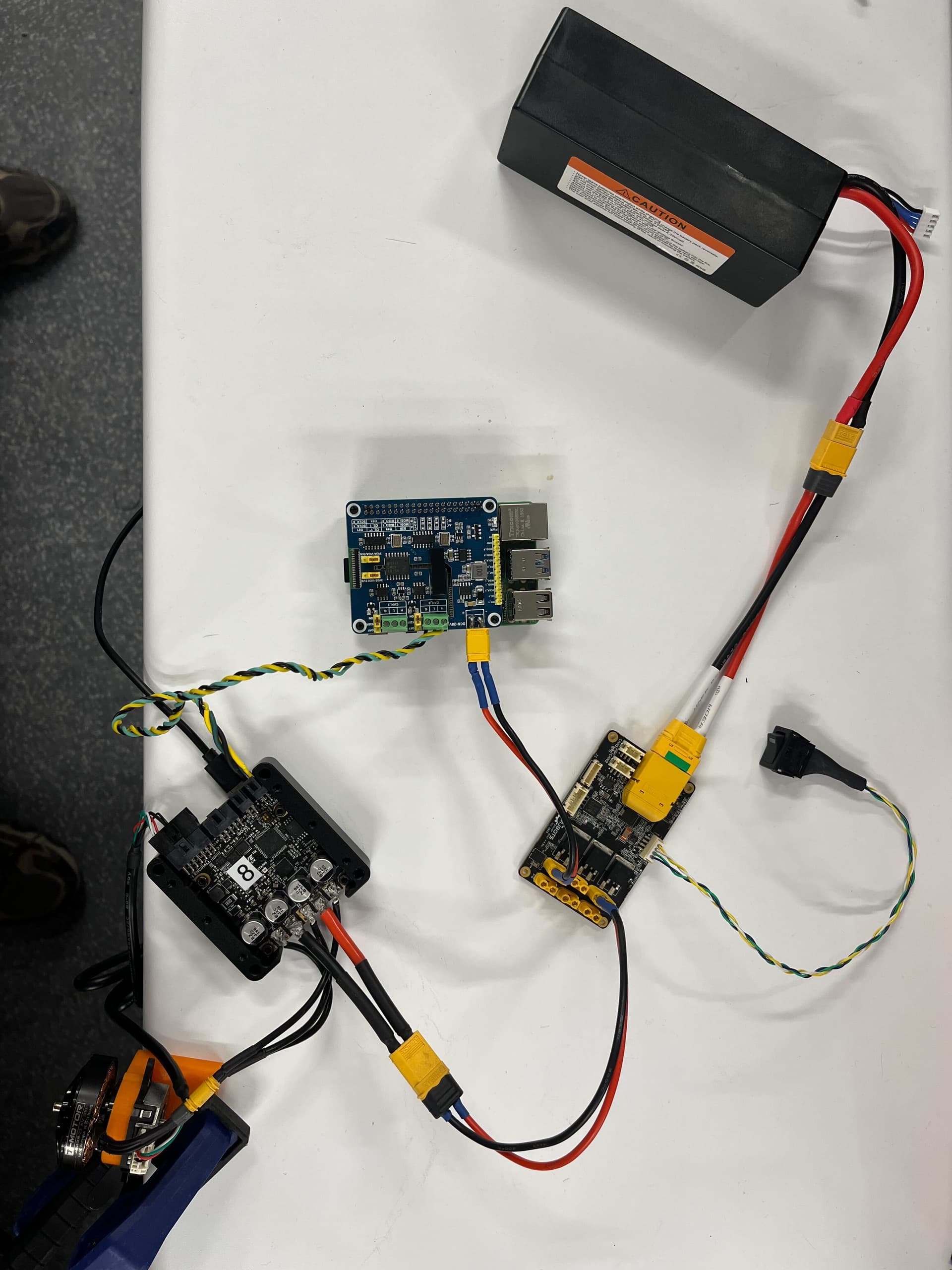
Hi, I am using 2 channel can fd channel board to receive the can messages from odrive pro, following their documentation (https://www.waveshare.com/wiki/RS485_CAN_HAT_(B)#CAN), I was able to set the two channels to can0 and can1 and was able to send message from can1 to can0 using the cansend command(just connect canH to canH, and canL to canL). However, when I connected the canH and canL to the odrive pro(canH and canL), it did not work.
I was able to correctly receive the can message using the raspberry pi rs485/can hat, but it requires me to connect the logic ground with the can ground in odrive pro.
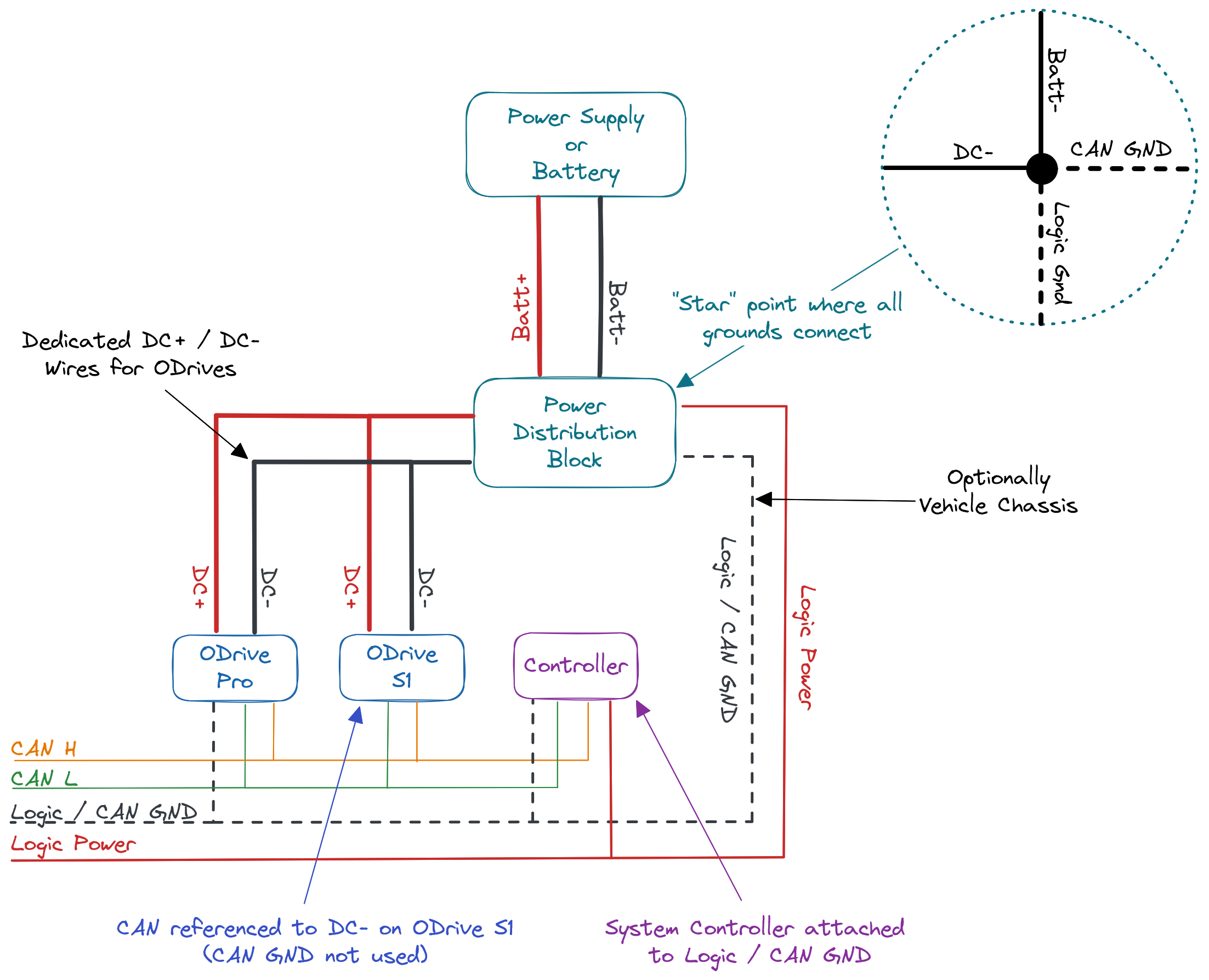
Does it means that I need to change the odrive pro to fully-isolated mode?
I tried to connect the odrive can ground with the logic ground on the 2-channel fd board, however, it did not work. Since I can receive the message through the self interaction in the can fd hat board, I think that it might be a issue of the configuration of odrive pro.
The two can ground in the can hat board is connected. However, it did not share the same ground as the power system, in this case, I think the solutions is either enable the full isolated can in odrive pro or connect the dc ground with the odrive pro can ground?
{kind=link}