Also, there is a third state where the encoder doesn’t stay ‘sulking’, but sets its error bit randomly, so that spi_error_rate is between 0.5 and 1, depending on the motor’s position.
I can’t see how this can be anything apart from a faulty sensor. Please correct me if you can think of any other reason for this!
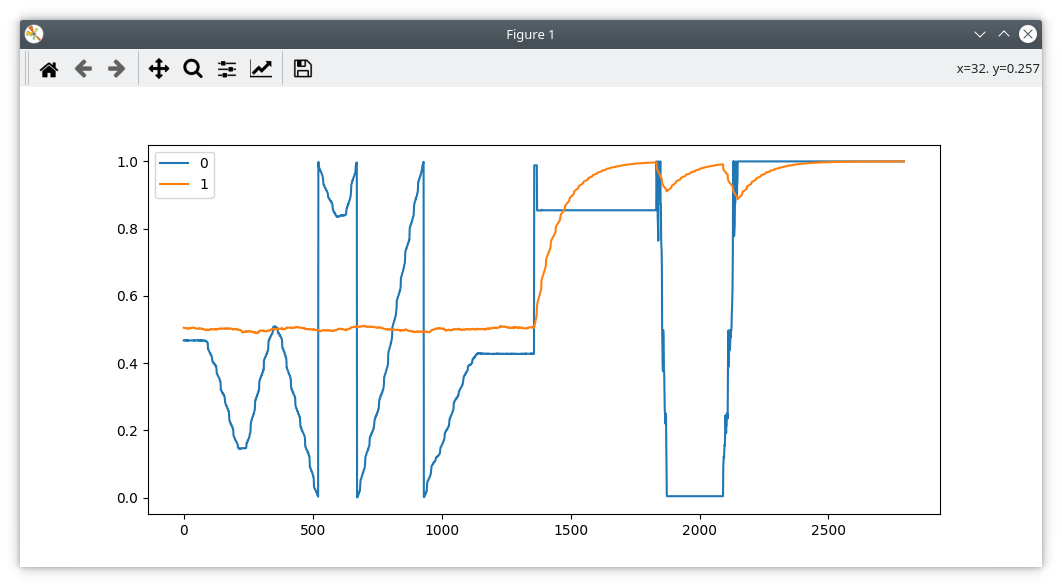
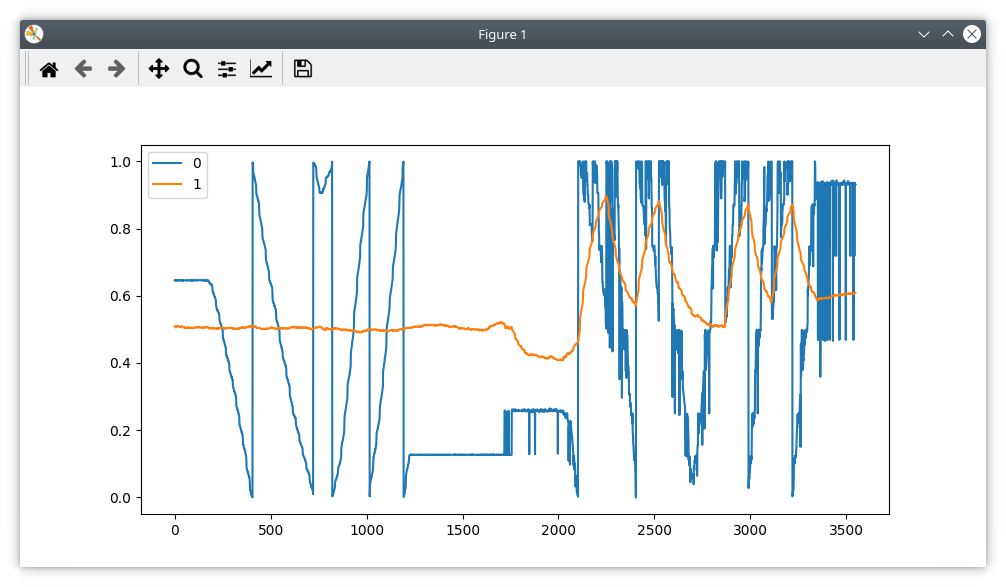
In the plot below, I have set the livepplotter up as follows:
# If you want to plot different values, change them here.
# You can plot any number of values concurrently.
cancellation_token = start_liveplotter(lambda: [
my_odrive.axis0.encoder.count_in_cpr/16384.0,
my_odrive.axis0.encoder.spi_error_rate,
])
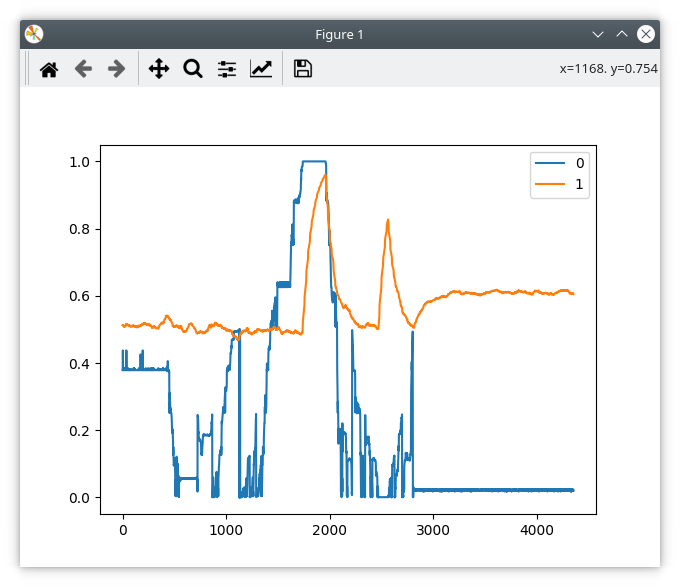
Blue is count_in_cpr / 16384.0 and orange is spi_error_rate.
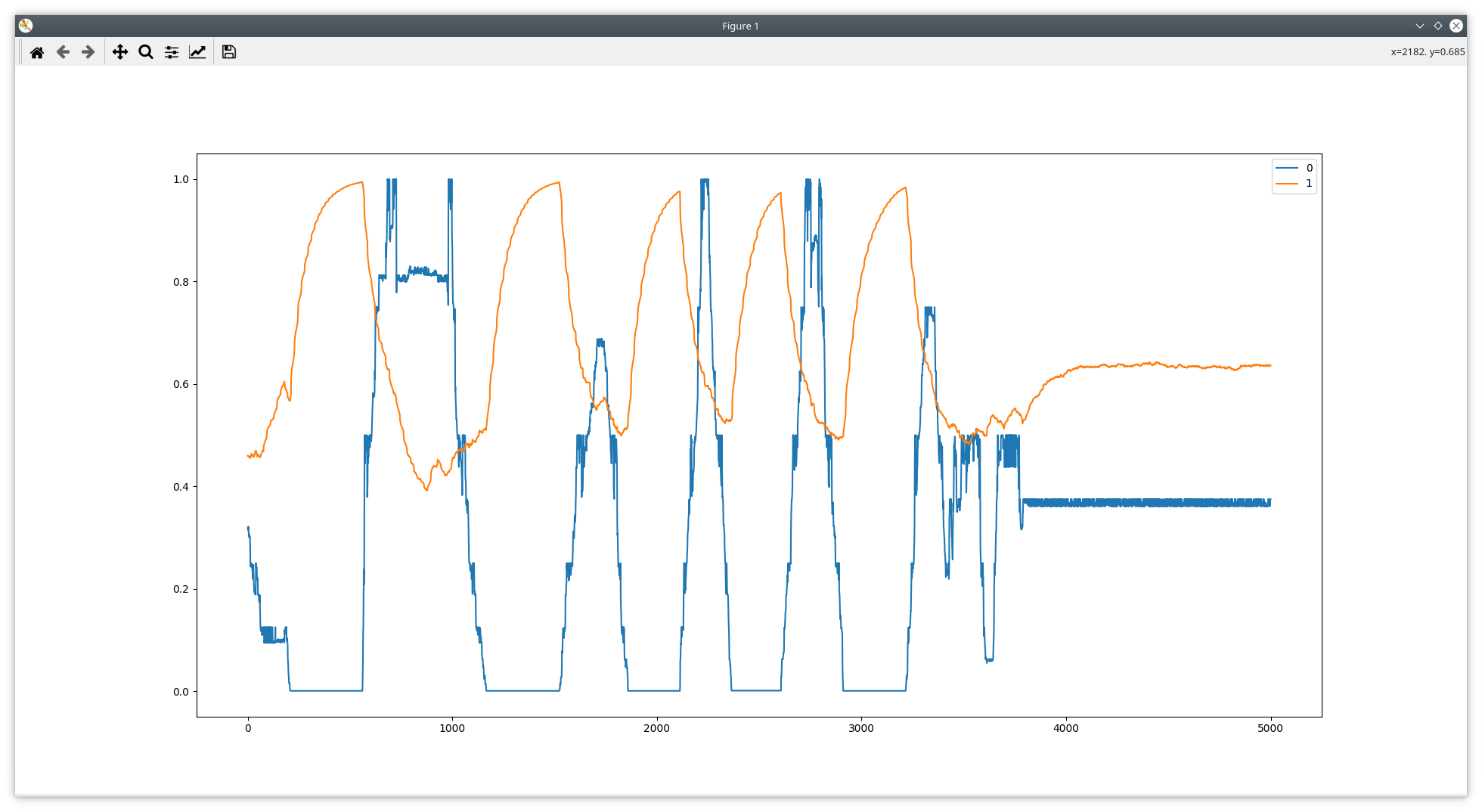
I am moving the motor by hand.
The encoder appears to read either zero or 16379 (and set its error flag) over half of its operating range. The remaining part of the range seems ‘normal’-ish, except spi_error_rate tends to 0.5 instead of 1. This is with the 3m extension cable.
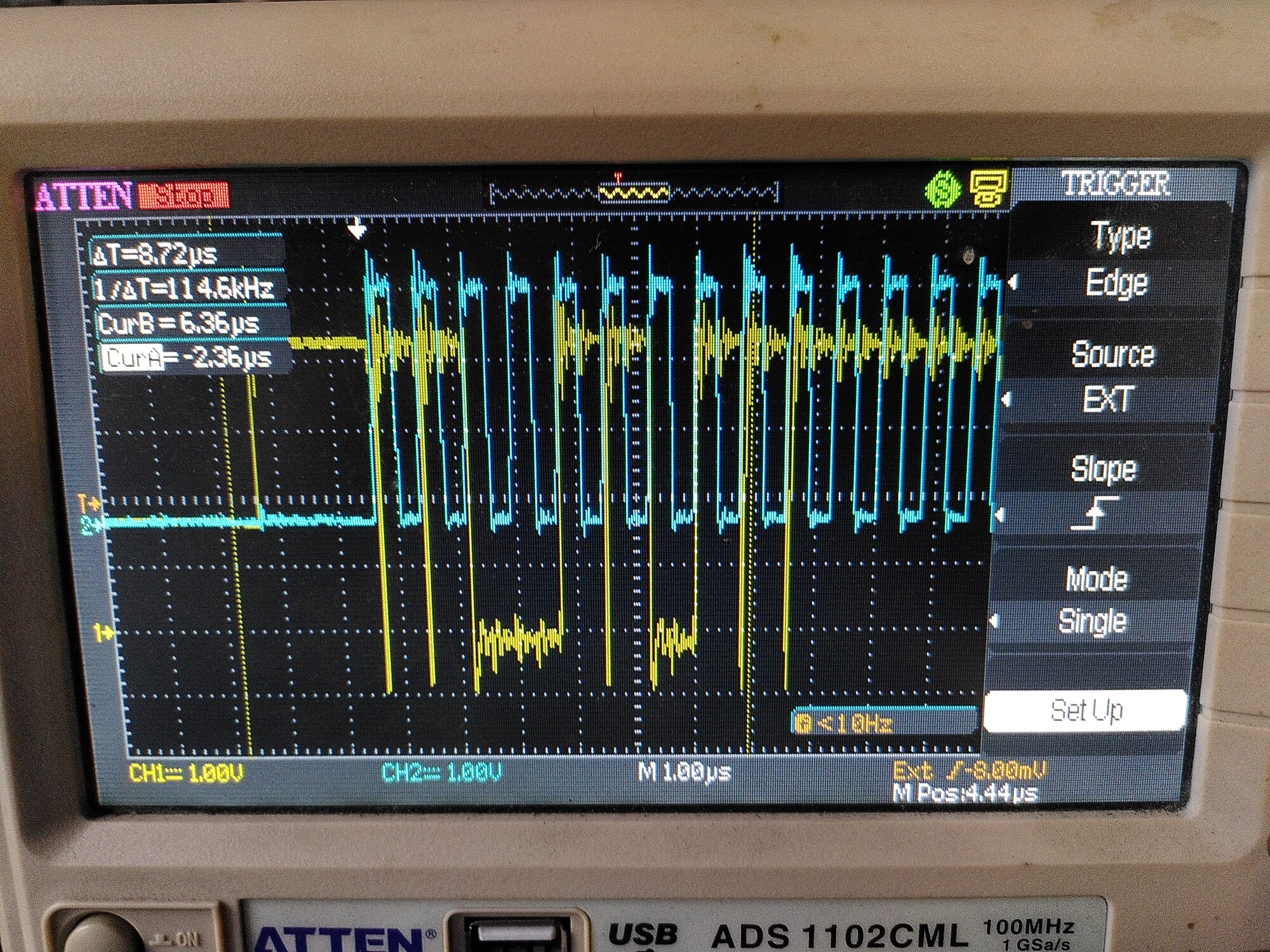
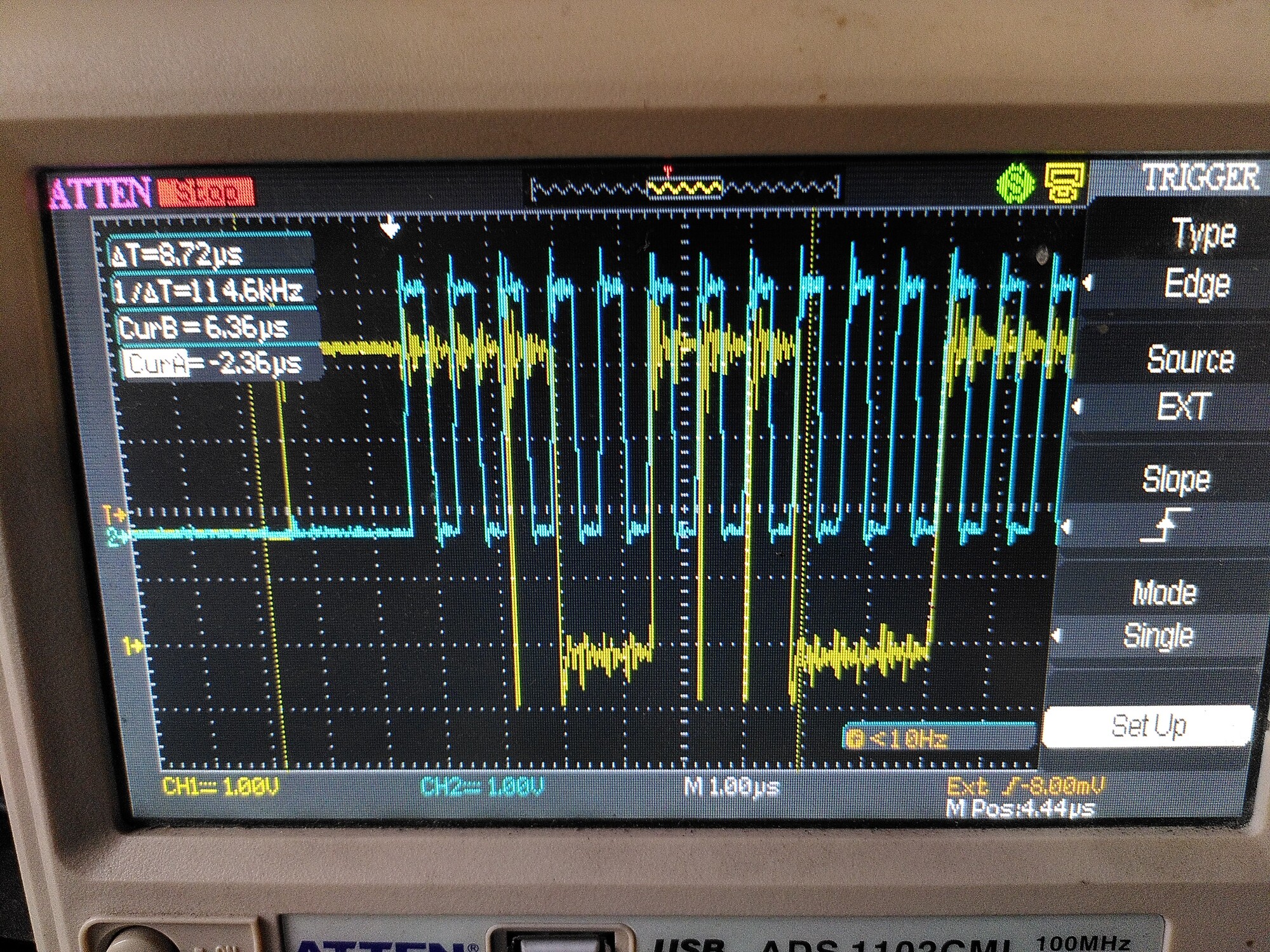
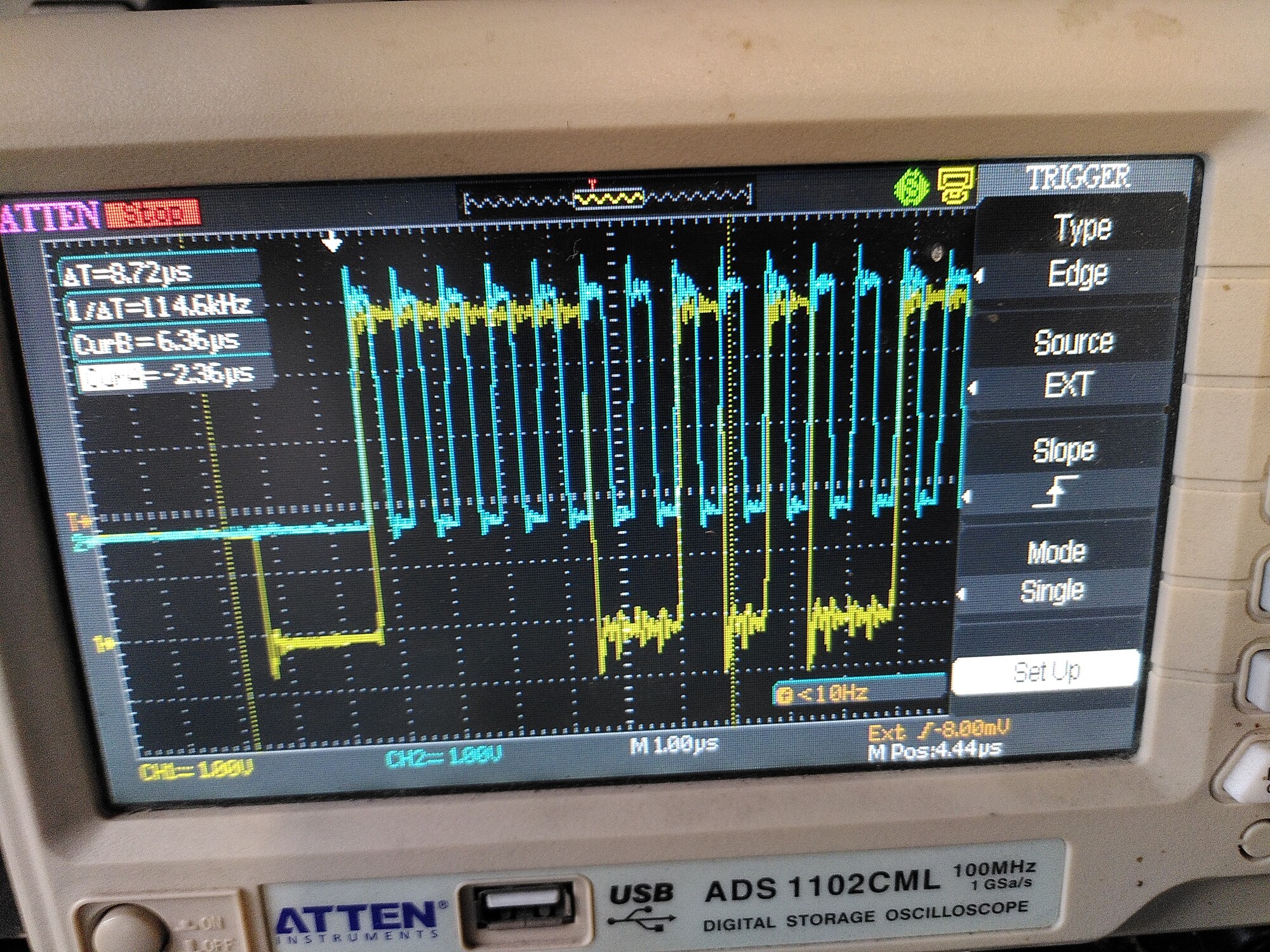
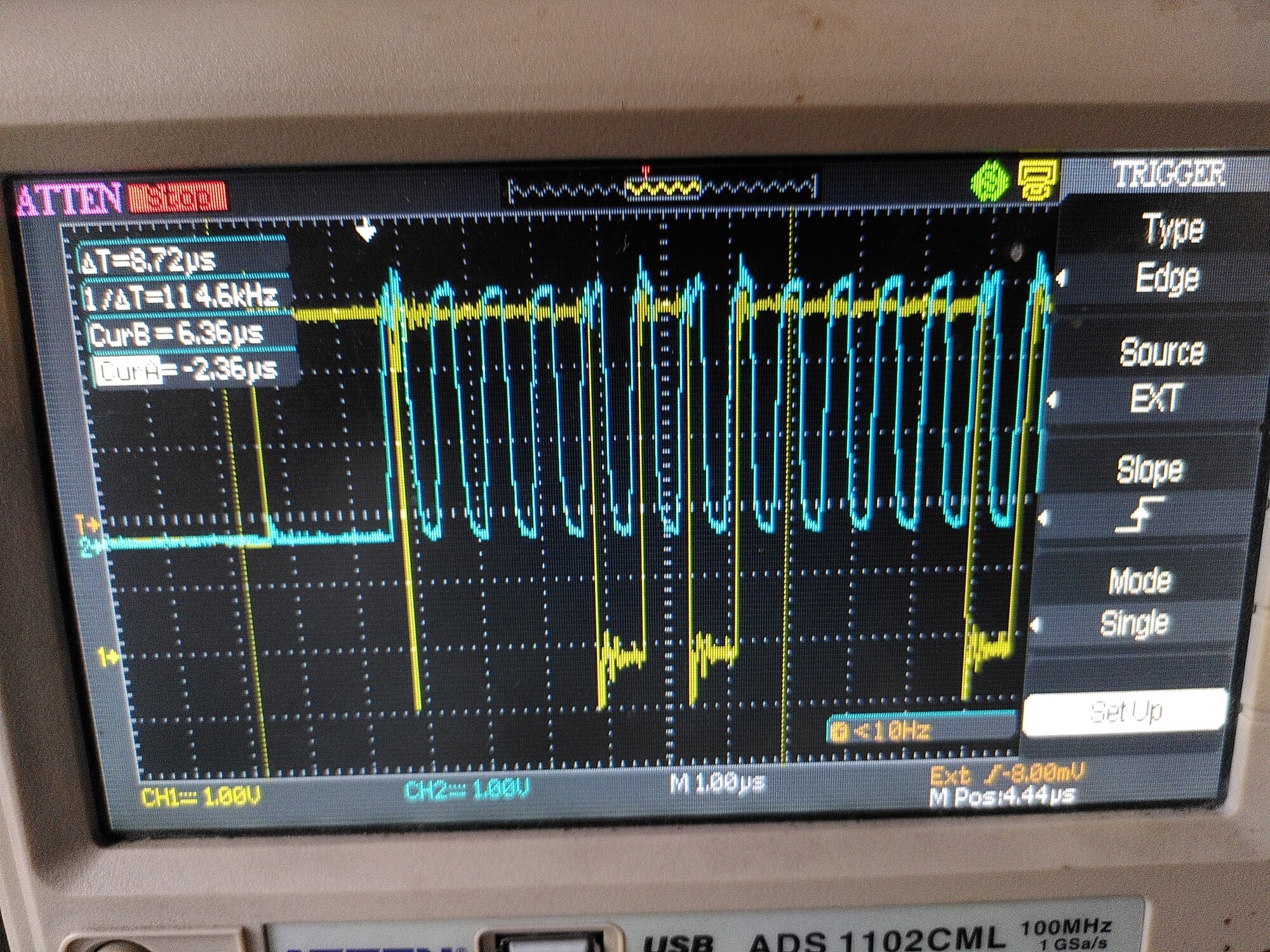
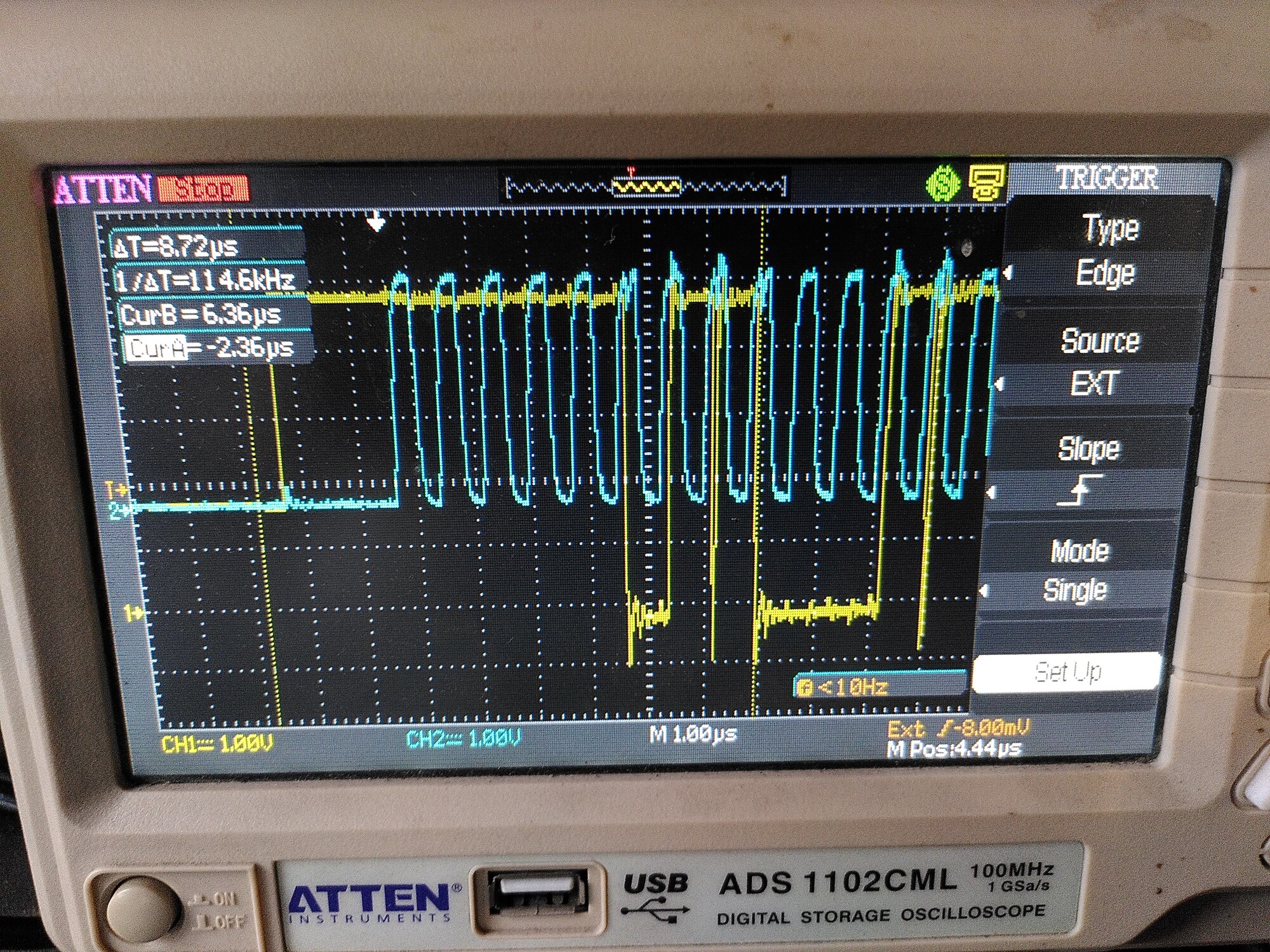
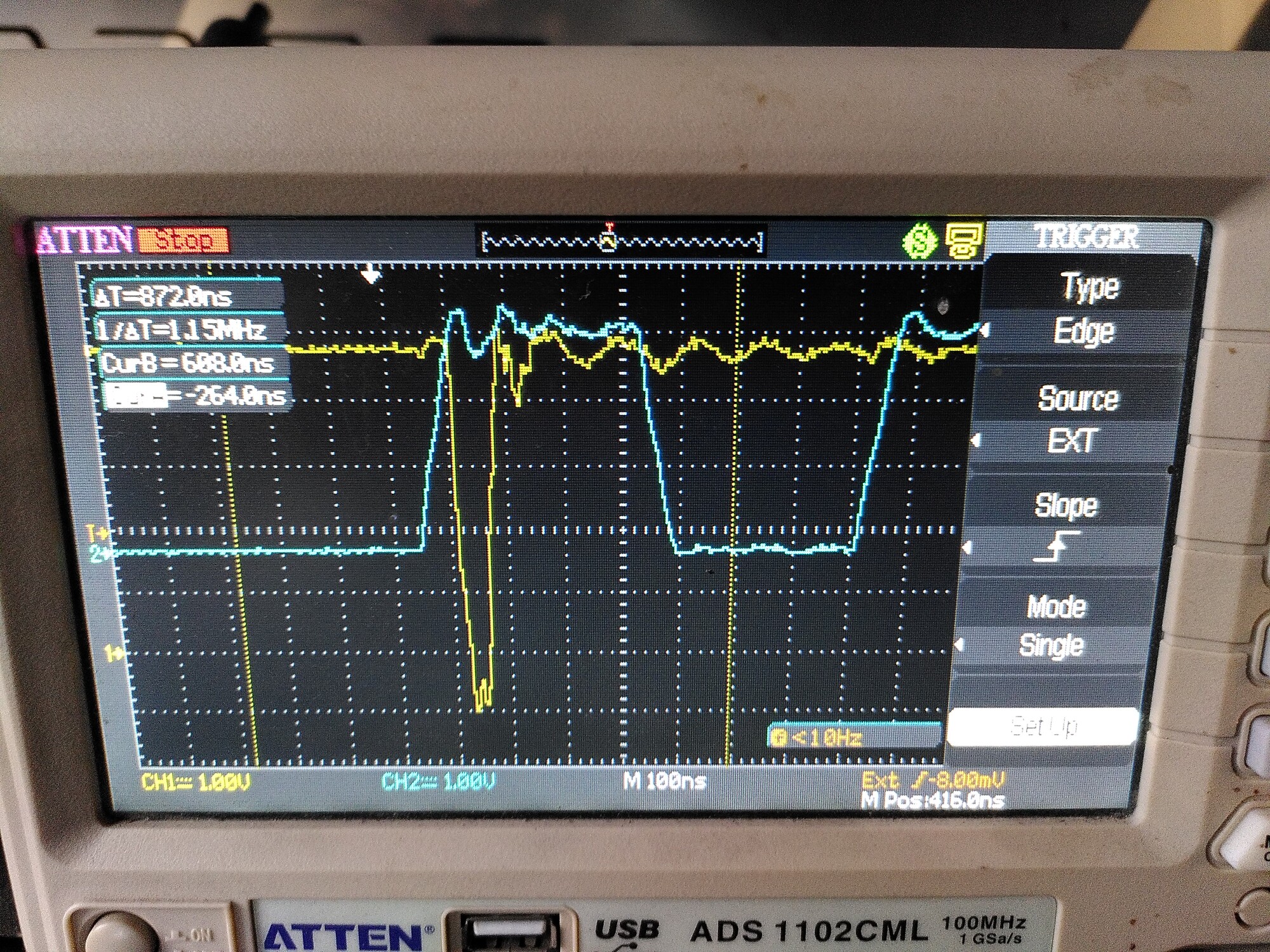
I can see from the scope though, that the error bit is being set about 50% of the time all the time (not just in certain positions) but at certain times (when most of the bits are 1) there are weird glitches where MISO spikes low briefly, at a much higher frequency than the clock.
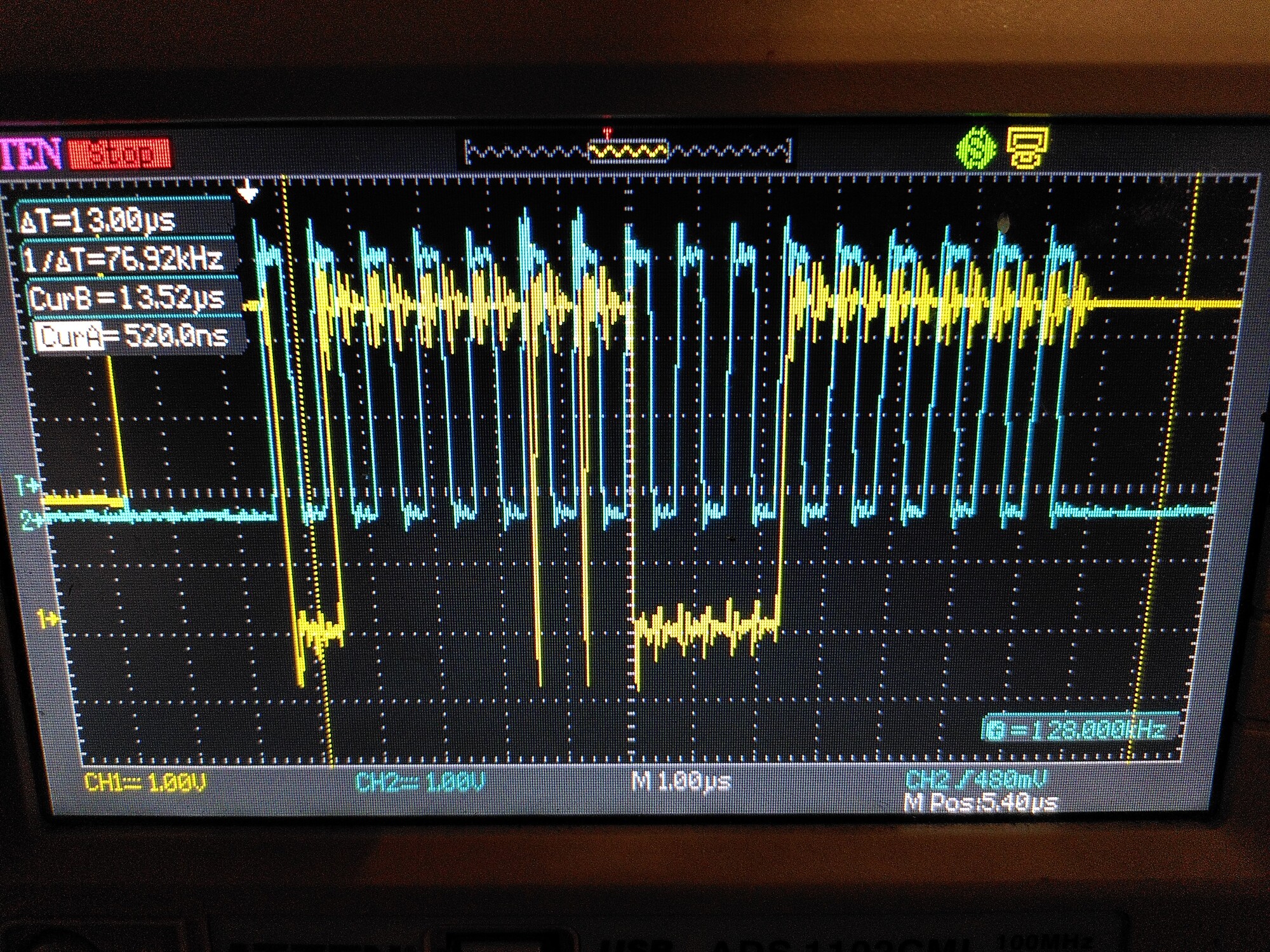
I can’t explain this. It’s either a fault with the chip, or maybe the chip is responding to some noise on the clock that I can’t see on the scope.