Hello
odrive with hoverboard wheels
firmware v0.5.1-dev
no errors
odrive was calibrated
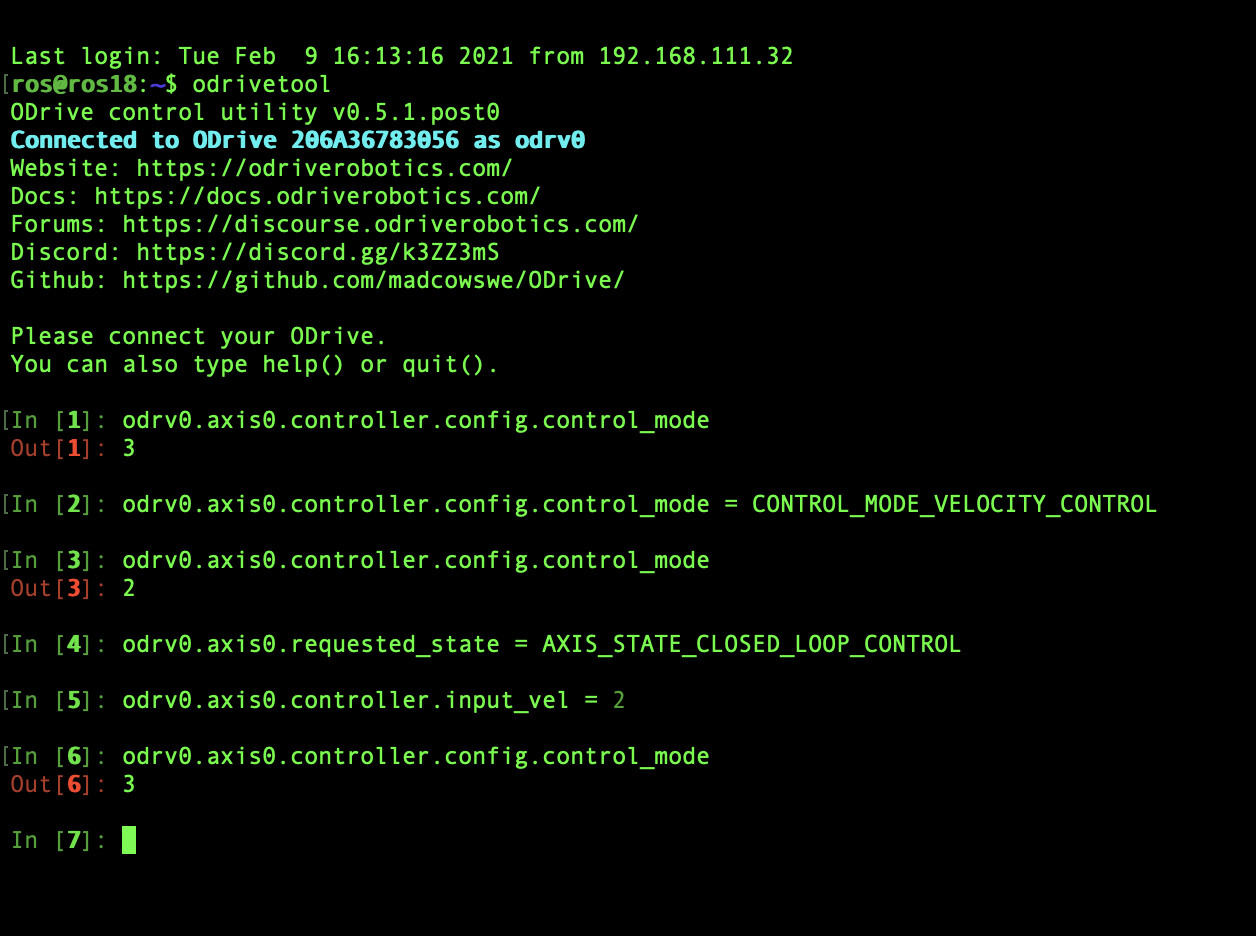
set: odrv0.axis0.controller.config.control_mode = CONTROL_MODE_VELOCITY_CONTROL
or odrv0.axis0.controller.config.control_mode = 2
set: odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
check odrv0.axis0.controller.config.control_mode, and it = 3
Why it automatically switch from 2 to 3
Position Control working fine. But I need velocity control mode.