Hi all,
So we’ve been using a custom integration of the ODrive v3.5 at work for the past several months and it has worked quite well. Recently we ran into a new issue and I was wondering if I might be able to get some insight from the community as to what the problem might be.
For background our FW version is ODrive FW v0.4.10 with a few minor patches. Our motor selection is the Maxon EC 45 Flat 70W (datasheet) with Hall effect sensors and no encoder. Since this is a lower current motor, we have adjusted the value of the current sense resistors to 15mOhm to try and improve the SNR for current sensing. The firmware has been patched accordingly. We typically run the motor in velocity control mode. We followed the hoverboard motor setup guide initially since that was closest to our application. In particular, we set the following configuration values:
odrv0.axisN.motor.config.pole_pairs = 8
odrv0.axisN.motor.config.current_control_bandwidth = 100
odrv0.axis0.motor.config.requested_current_range = 10
odrv0.axisN.encoder.config.mode = ENCODER_MODE_HALL
odrv0.axisN.encoder.config.cpr = 48
odrv0.axisN.encoder.config.bandwidth = 100
odrv0.axisN.controller.config.vel_limit = 5000
(I can provide more details regarding the configuration later when I have access to the hardware to take a look at it again.)
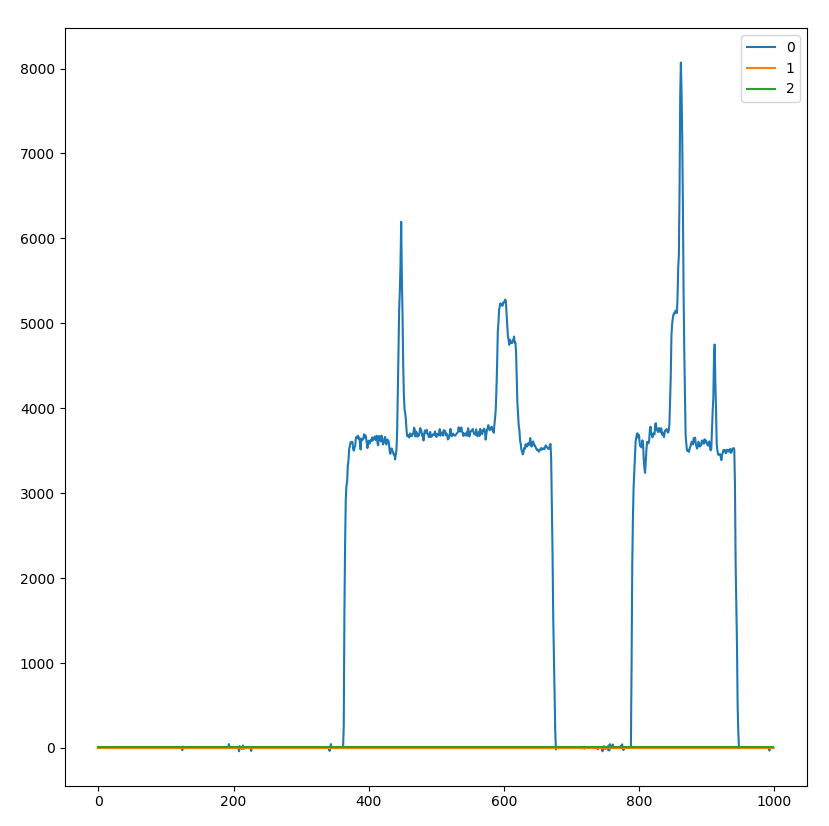
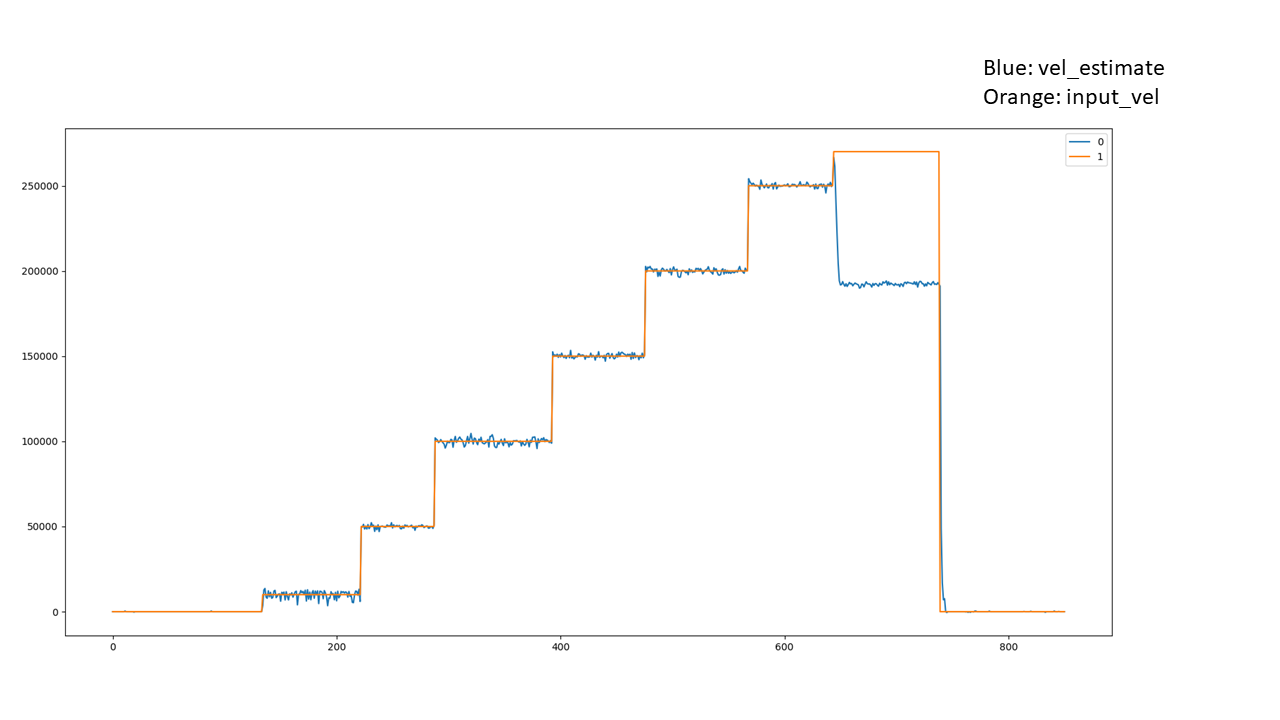
Up until now we have run the motors at a maximum vel_setpoint of 2500. Today we tried to run the motors at a higher velocity and we got an interesting result. See the attached plots below:

(I had a second image, but I guess new users are only allowed one image per post.)
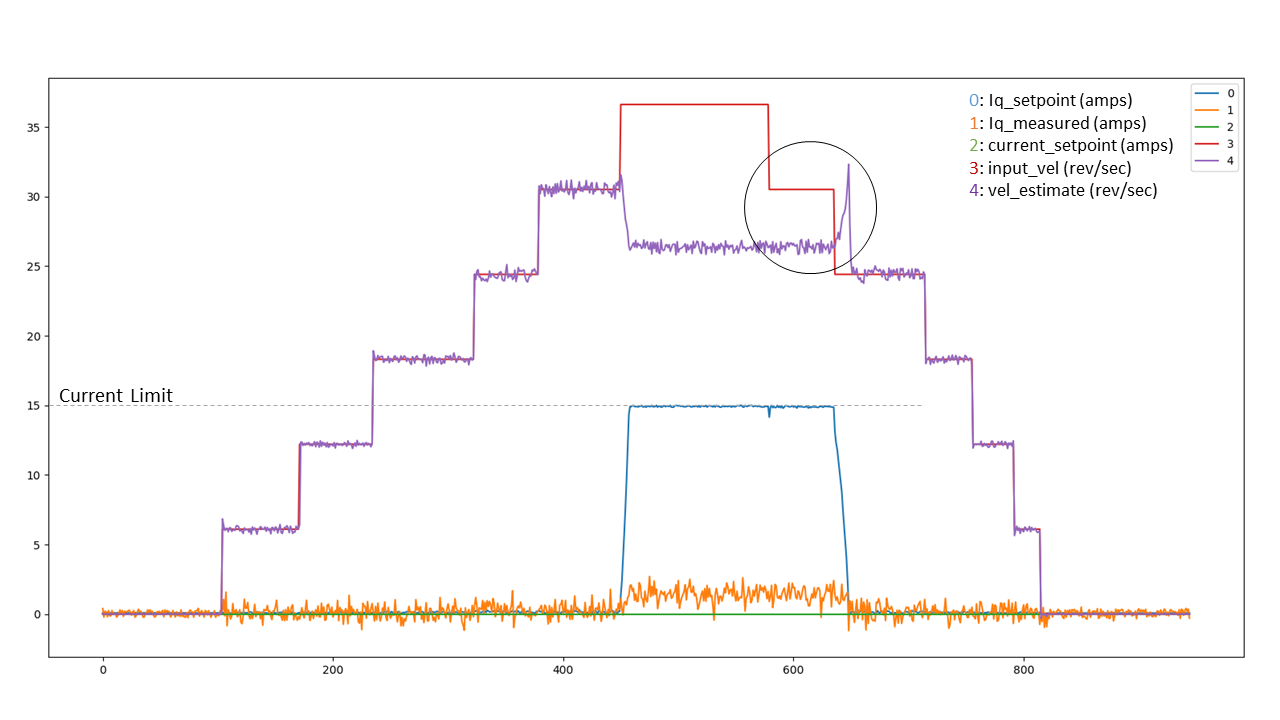
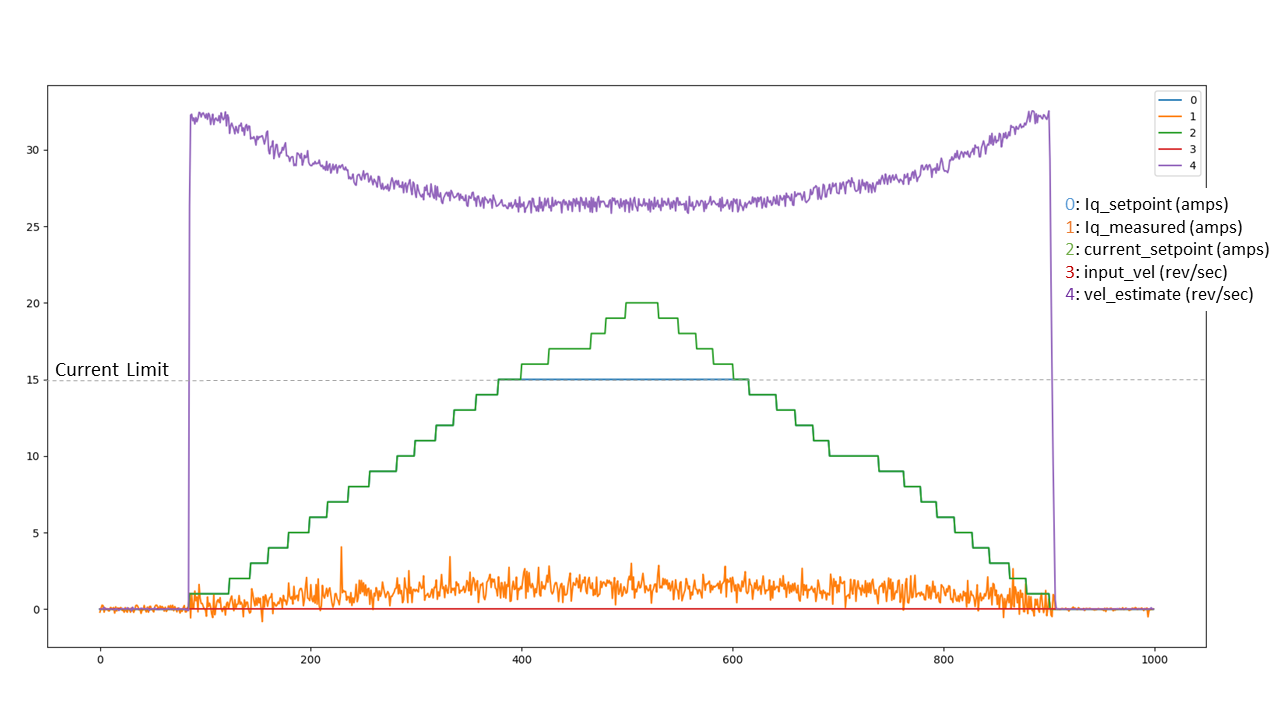
In both plots, the blue trace is the velocity setpoint, the orange trace is the estimated velocity, and the green trace is the Iq_setpoint in mA. The maximum current has been set to 5.5A. Once the velocity setpoint reaches a certain threshold (somewhere around 3700 counts / rev), the Iq_setpoint jumps to the maximum allowed value and the velocity control loop breaks down. The velocity estimate seemed to drop to the same value each time and motor speed seemed to roughly match the reported estimate. The only way to clear the drive out of this state is to lower the velocity setpoint back down below where it dropped in the failure event. Surprisingly, I haven’t picked up any ODrive error codes during this event. This is very strange behavior, and we only have a few rough guesses as to what the root cause could be.
-
We’ve experience some problems with noise on the current sense lines, so it’s possible that the current control loop or phase current measurement is unstable and causing this problem?
-
It almost looks as if the velocity estimation can’t track velocity beyond a certain value. Maybe we’re hitting some sort of upper bound on the velocity measurement due to the Hall effect sensors / lack of encoder / lower encoder bandwidth?
For what its worth, we tried testing a motor with the ESC sold by Maxon and we were able to get the motor to a much higher RPM, so we know it’s not an inherit limitation in the motor. We’re going to try with an official ODrive board tomorrow to see if the problem is isolated to our custom board, so I’ll report back if we get any information from that testing.
Any thoughts as to what the root cause might be here? Suggestions for things that we should test? I’m intrigued by this problem as I’ve not seen anything quite like it before in working with the ODrive. Thanks for any assistance!