Hello!
I am using two ODrive S1s with 16384 CPR ABSOLUTE RS485 ENCODER WITH CABLE FOR ODRIVE PRO OR S1 and DUAL SHAFT MOTOR - D6374 150KV. I supply them with a 24V 4.5A 100W power supply.
The plan is to use them in a cable-driven parallel robot, something like this: RopeBot - Prototype 2: A cable-driven robot with 3 degrees of freedom (youtube.com)
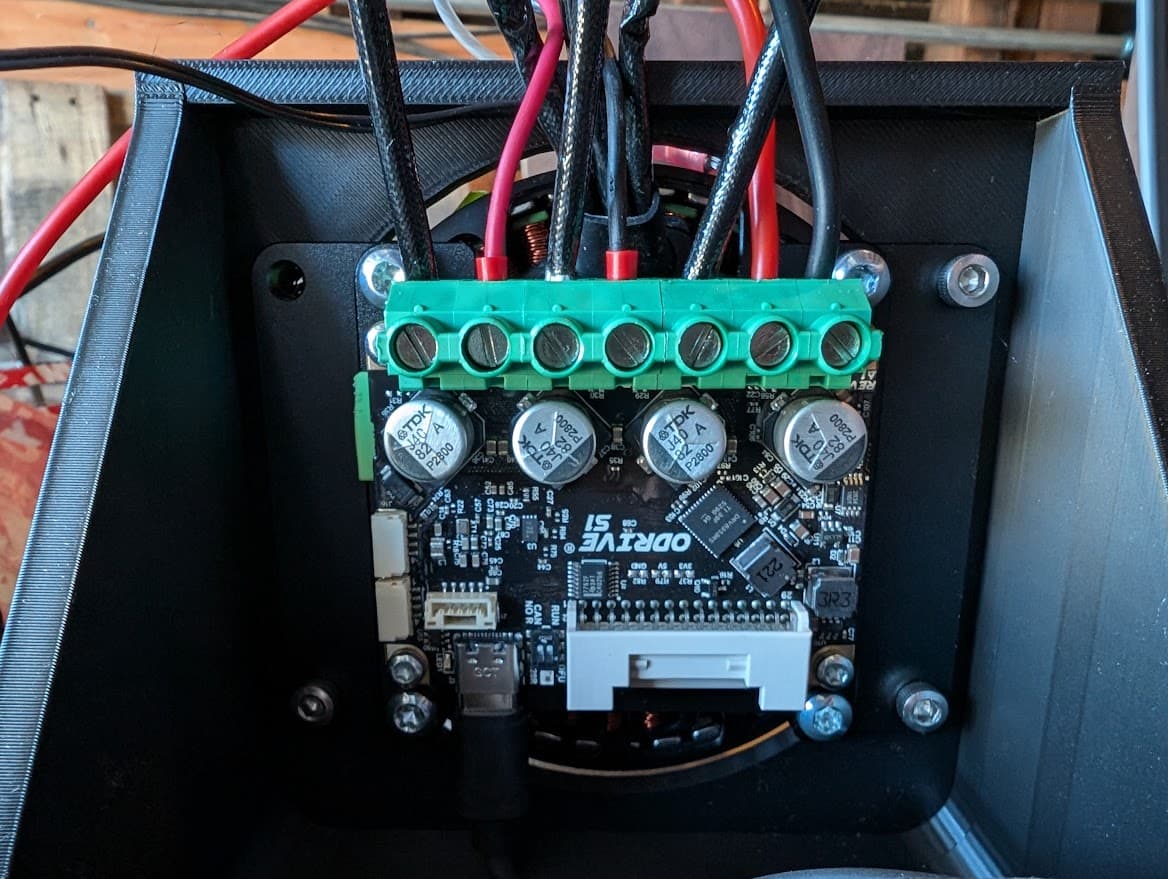
I currently have two of them mounted as shown:
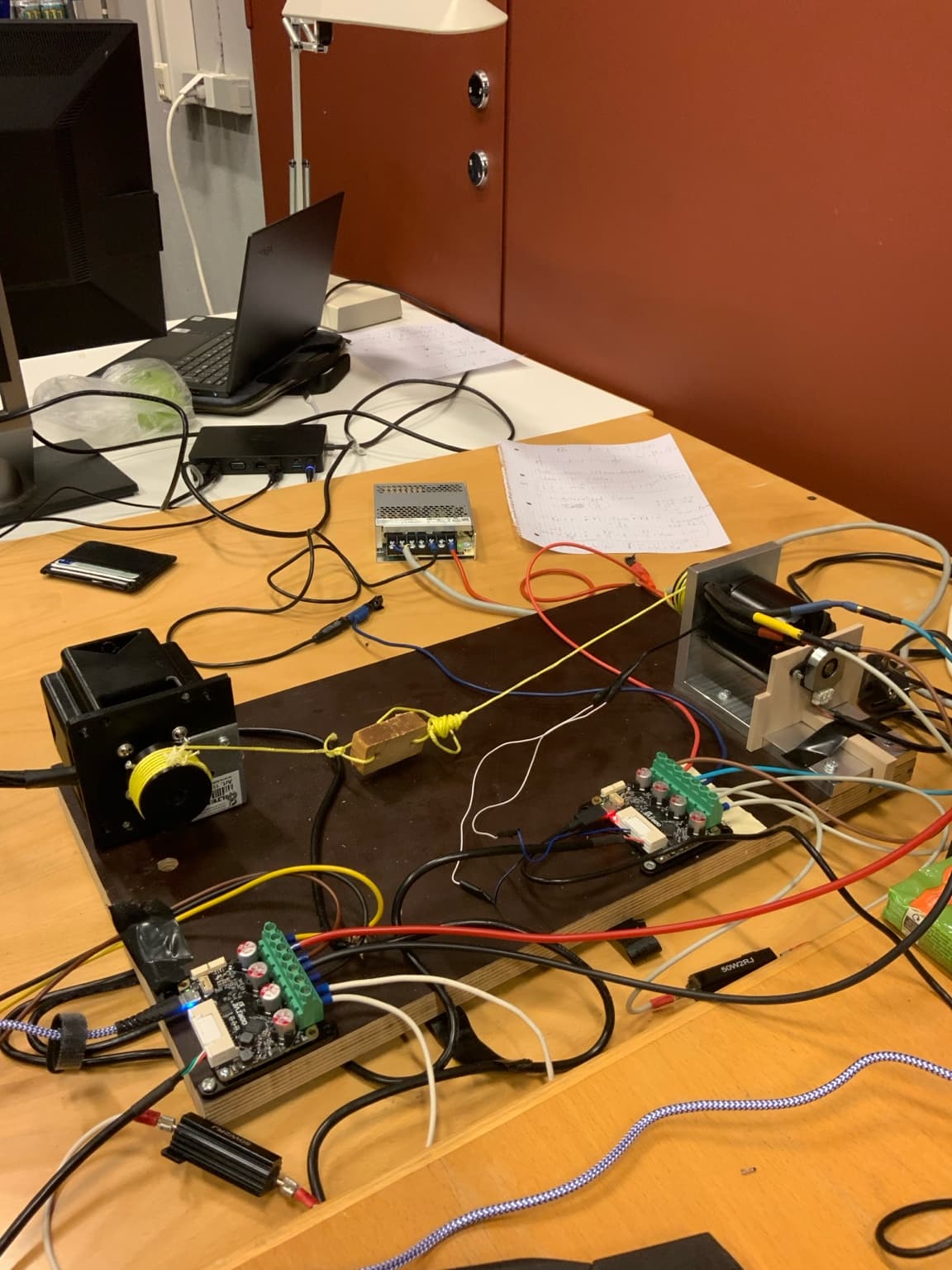
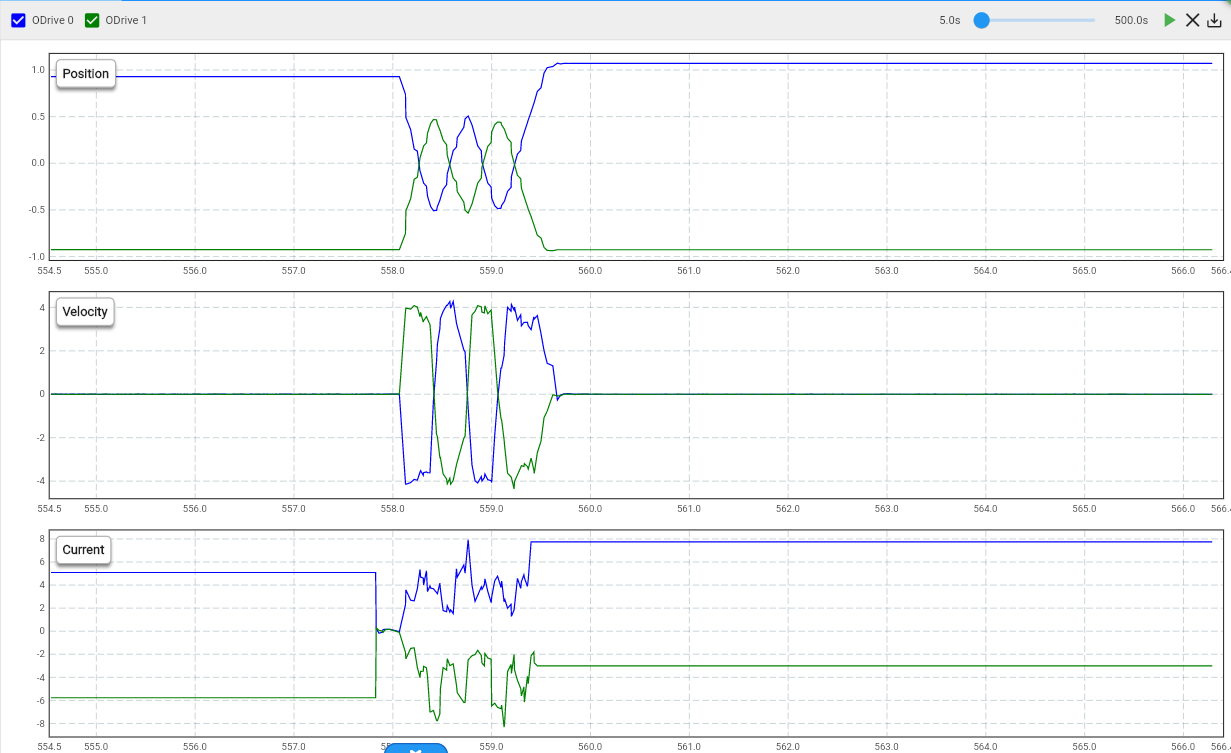
I control the position of the wooden block by reading each motor’s encoder position and using it to calculate the direction to “pull”. To ensure tension in the cable, I use Torque mode and let the torque request sent to each motor vary by ± some number to get enough difference in torque to move the wooden piece.
This works perfectly fine when the velocity limit is set to <= 4 turns/sec. This is a bit slow, so I want it to move faster, but the moment I turn it higher, DC_BUS_OVER_VOLTAGE errors trigger, either in one of the ODrives or both.
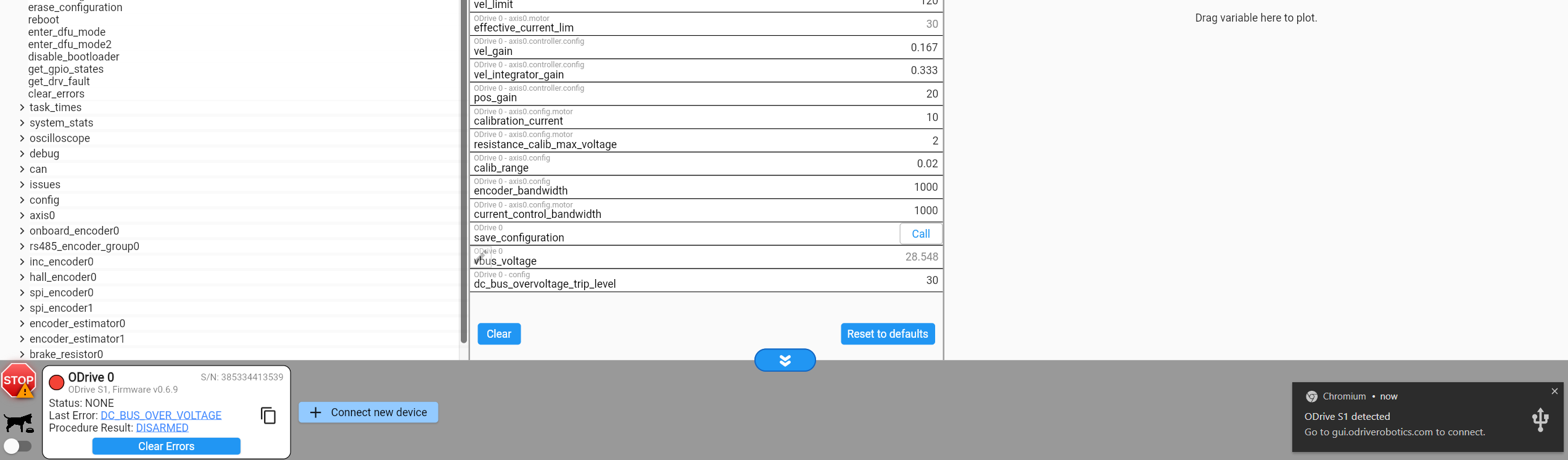
{
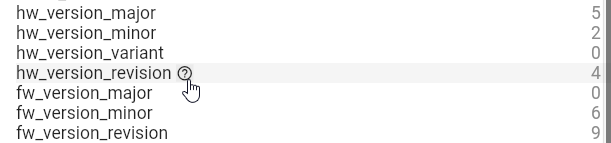
“fw_version”: “0.6.9”,
“commit_hash”: 2499272527,
“product”: “5.2.0”,
“active_errors”: 134217728,
“active_errors_str”: “BRAKE_RESISTOR_DISARMED”,
“disarm_reason”: 256,
“disarm_reason_str”: “DC_BUS_OVER_VOLTAGE”,
“procedure_result”: 3,
“procedure_result_str”: “DISARMED”,
“last_drv_fault”: 0,
“internal_issues”: 0
}
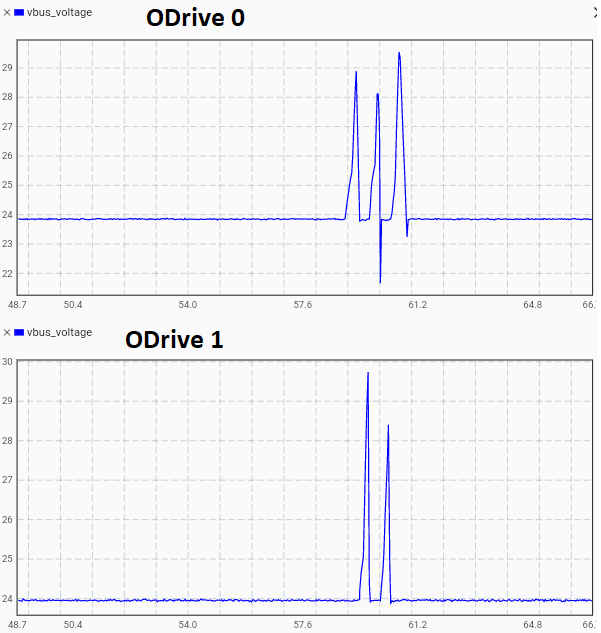
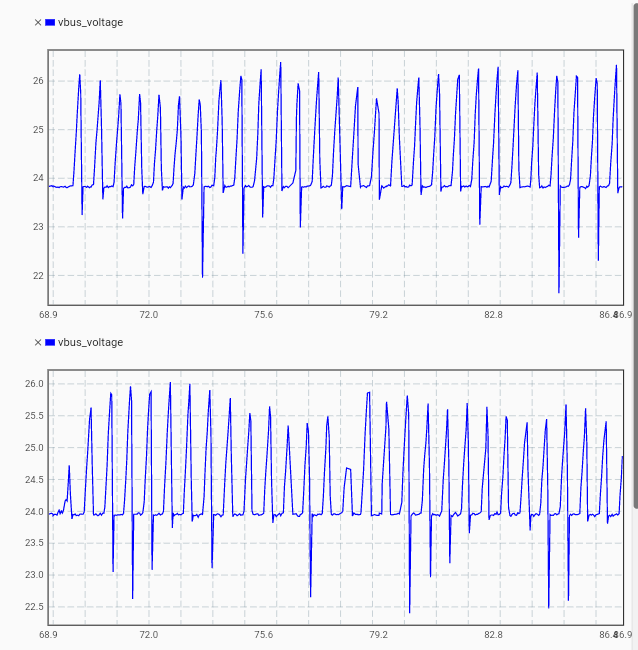
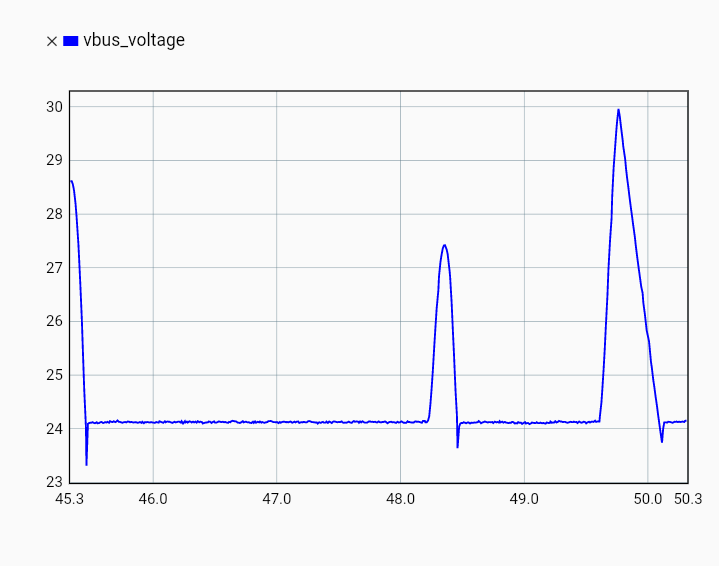
When logging the v_bus voltage, the voltage spikes when the setpoint change occurs, and regardless of how much margin I configure the motors with, they always trigger the error. I have tested with a bench power supply which I cap at 15V, and configured the trip level to 24. It still triggers.
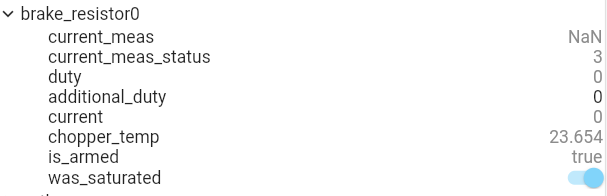
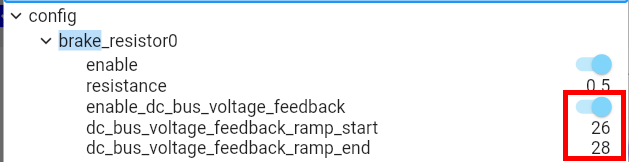
I also tried to increase the brake resistor to 2.05 ohms in steps, as suggested in the documentation, but this did not help either.
Is there something I am missing here, or is it just not possible to get more speed out of the motors in torque control?
I am grateful for any and all input ![]()