Hi Folks, I love the odrive close loop performance. I’m researching a large scale 3D printer build, and have to date been considering a ustepper as it’s a drop in replacement in a marlin firmware printer.
It’d be awesome if you could provide drop in code as per ustepper to allow its seamless 3d printer integration. I’d definitely be up for a couple of boards and 4 encoders if I could use them in my application.
Any thoughts would be much appreciated.
Many thanks
hey @cncmodeller, I’m currently working on a large 3d printer that uses odrive, I’ll probably place the project on hackster when I get some time, I’m planning on using the same control board with step/dir interface to odrive, that way it should be a drop in replacement to steppers without changing any firmware
I don’t think that’s required. The ODrive should work in step/dir mode as a drop-in replacement already, without any code changes. You just need to configure step/dir mode with the odrivetool.
Hi all, how is the 3D printer application going? I was actually wondering if a larger HangPrinter version could use broshless motors with oDrive.
I am also working on an application similar to the HangPrinter. It is about controlling a strings-attached load in 3D space. You can use it for 3D printing, you can use it as a replacement for the CNC frame of FarmBot, you can place a camera on it, … These large-scale applications don’t require high precision. But we will eventually run into some problems that the HangPrinter community has run into in trying to manage 3D motion of a load hanging on strings.
So we are trying to create a closed-loop motion control system using the actual position of the load, from distance sensors.
We’ll take a month for this sprint to a first prototype. We don’t want to reinvent the wheel, we would like to collaborate with anyone who has experience in the field and release everything as open source. [our project is sponsored, so participants get financial rewards in proportion to their contributions] http://www.sensorica.co/home/what-we-do/projects/spider-rig
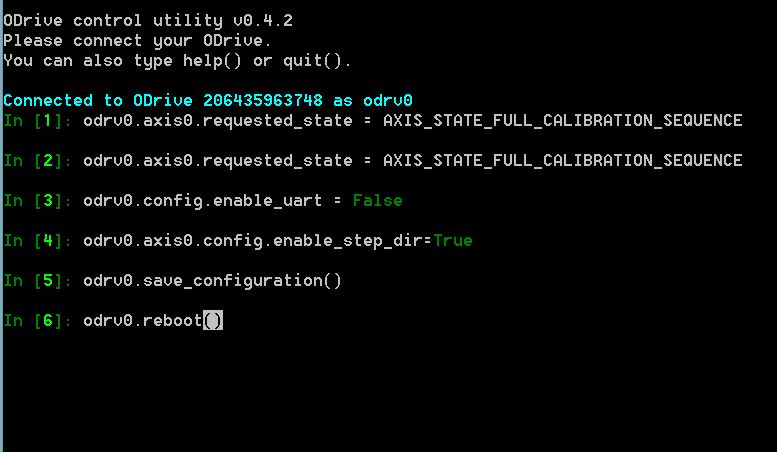
Hello I tried to follow the procedure see the picture attached but I can not run the M0 engine when it is connected to my Arduino Mega 2560 + Ramps 1.4 I recovered the dir and the wire step in gpio 2 and 1
do you have an idea I do not understand why it does not work so with the Arduino test procedure it works fine
thank you