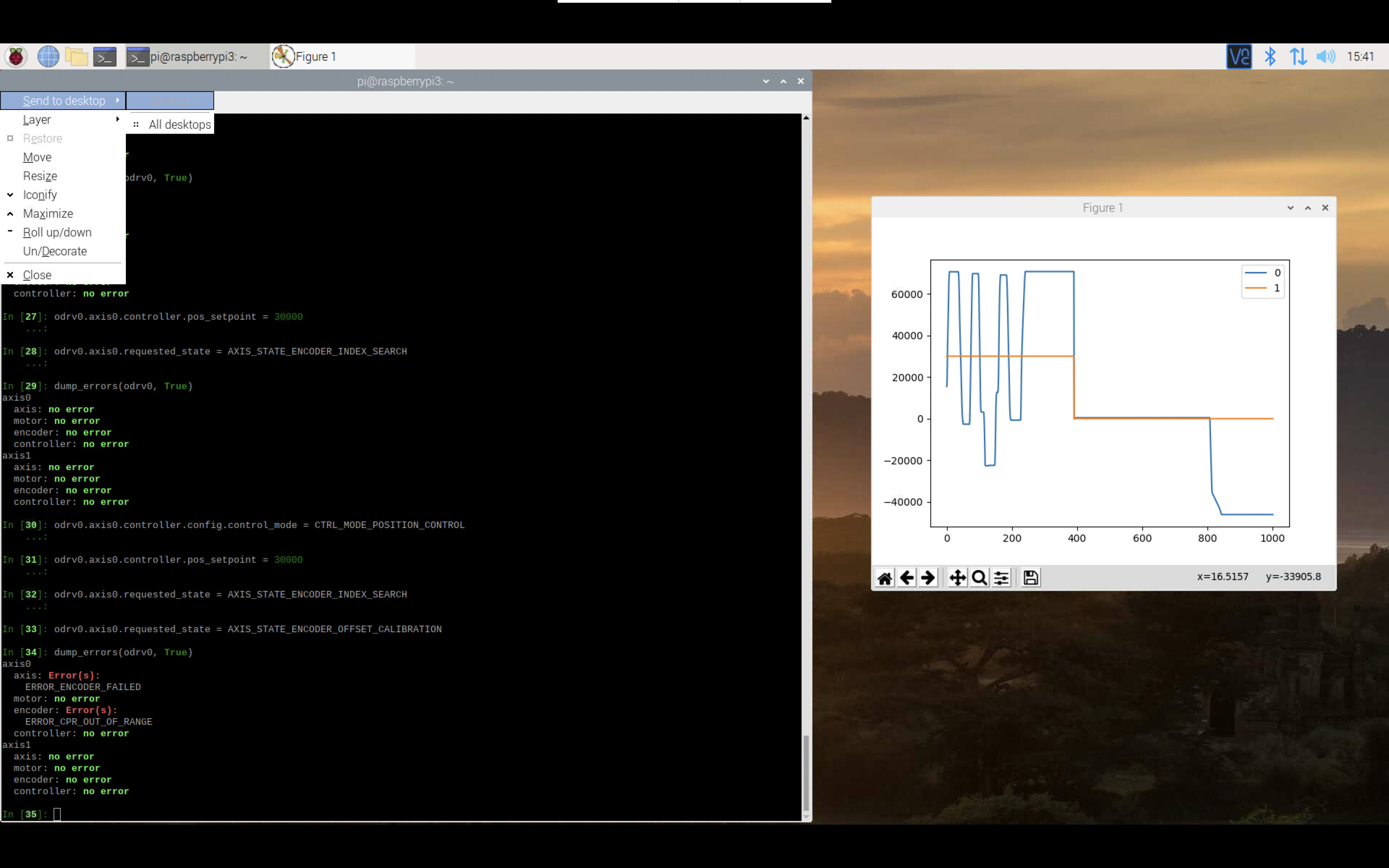
I am having difficulties getting my motor to calibrate. It’s inside an oil-filled housing and is difficult to get to, so I’m trying to debug as much as possible from Odrivetool. What potential problems does this graph show when index searching? See how it finds a new value every time?
All my tests end in ENCODER FAIL, CPR out of range, and similar. If I can’t get the encoder to work, I’ll need to just run the system in sensorless, but I’m having issues setting that up as well.
I have set the CPR to the datasheet for AMT 102, reduced the accuracy requirement, increased currents on the motor, and so on. When I back drive the planetary gear the readings are smooth, and do not jitter like in the index search.
The encoder itself is very precise. I can turn the gear a couple of times, then turn it back to the same spot, and the reading is veeery close. Why does it only jitter during calibration??
Any way to bypass the encoder calibration and just go? The set value and actual value look like they are behaving correctly, it’s just the safety flags that are stopping me from changing operation state and driving. Motor calibration works just fine every time.
I think there is probably electrical noise interfering with your encoder. Can you try using the ferrite rings from the shop to stop the motor from emitting EM noise, and/or try adding 22nF capacitors between each of the encoder signals and GND.