Hi guys.
I’m using odrive with duet 2wifi.
Running a home made linear tubular motor.
Setting up for y axis only.
Linear encoder magnetic.
I have a endstop on one end, which is used on the duet board.
The calibration sequence needs to go to endstop then to end of encoder strip, calibrate, then home to endstop.
Do I series up endstop with odrive and duet.
Or can the odrive receive endstop signal from duet.
Thanks in advance.
I don’t understand. Why do you need the ODrive plugged into the endstop at all?
Trying to work out how do calibration at start up before I do it.
It’s a linear tubular motor bldc (so 3 phase)
I’m building it to use as 3d printer and or cnc.
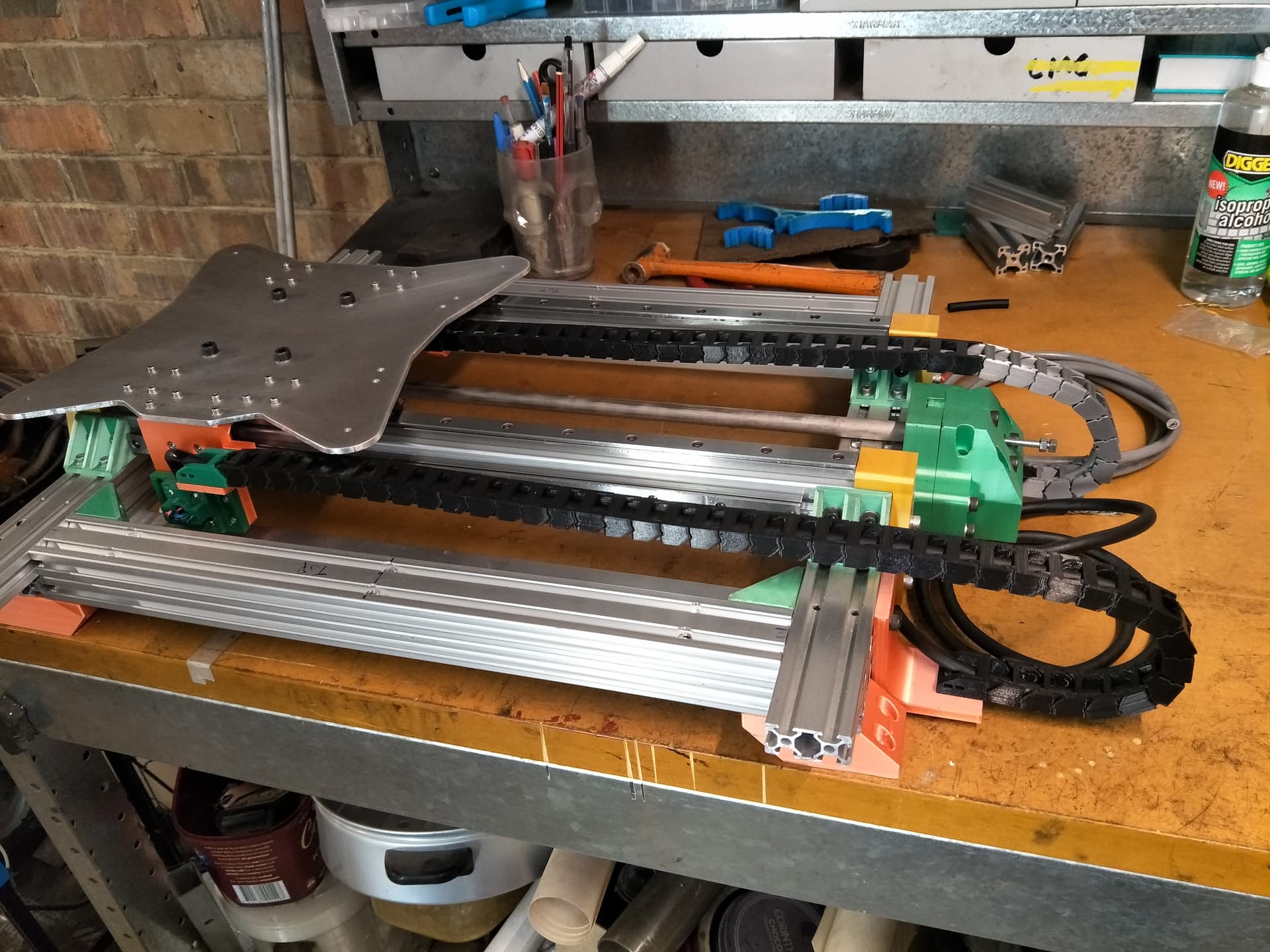
This is my load test rig.
When running you normally home to endstop on start up for the printer.
This has a incremental magnetic encoder linear.
I was going to try and use one end of the magnetic strip as a set point for calibration.
I’m unsure if I’m going about it the right way.
I also have questions about setting up when it’s a linear motor.
Eg I have 6coils all up, 2-poles per phase.
49 magnets in the tube.
The resistance is 11ohms running on 24 v.
The encoder has a resolution of 0.001mm
And about 300mm of travel.