What exactly triggers the current_limit_violation
From odrive.motor.error
Need help understanding this error pls
What exactly triggers the current_limit_violation
From odrive.motor.error
Need help understanding this error pls
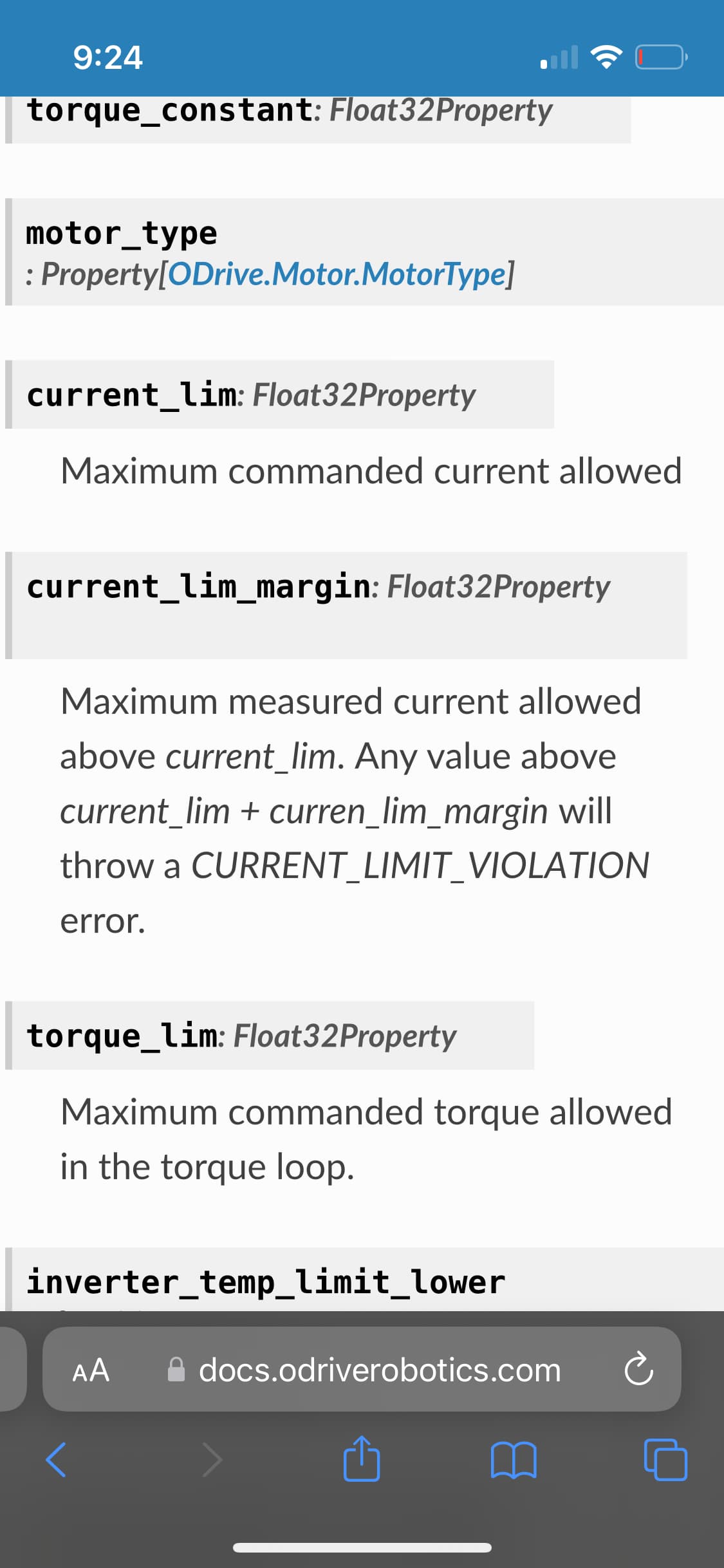
If the current sent to the motor is greater than current_lim + current_lim_tolerance, you’ll get an error. When is it happening?
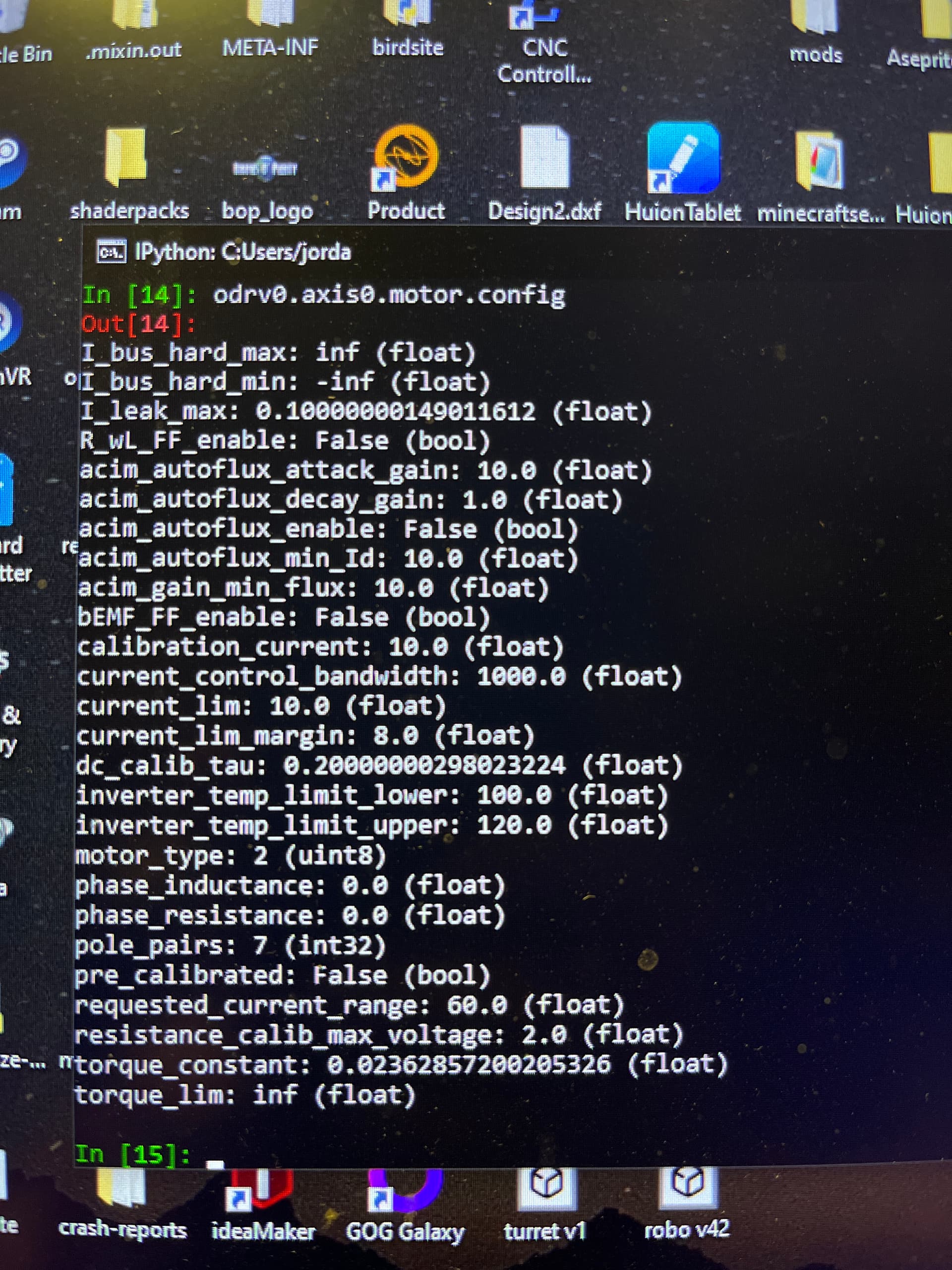
It happens when I do a odrv0.axis0.request_state = axis_state_full_calibration_sequence and the motor Turns a tinny bit but does not beep like it should beep and I get the error
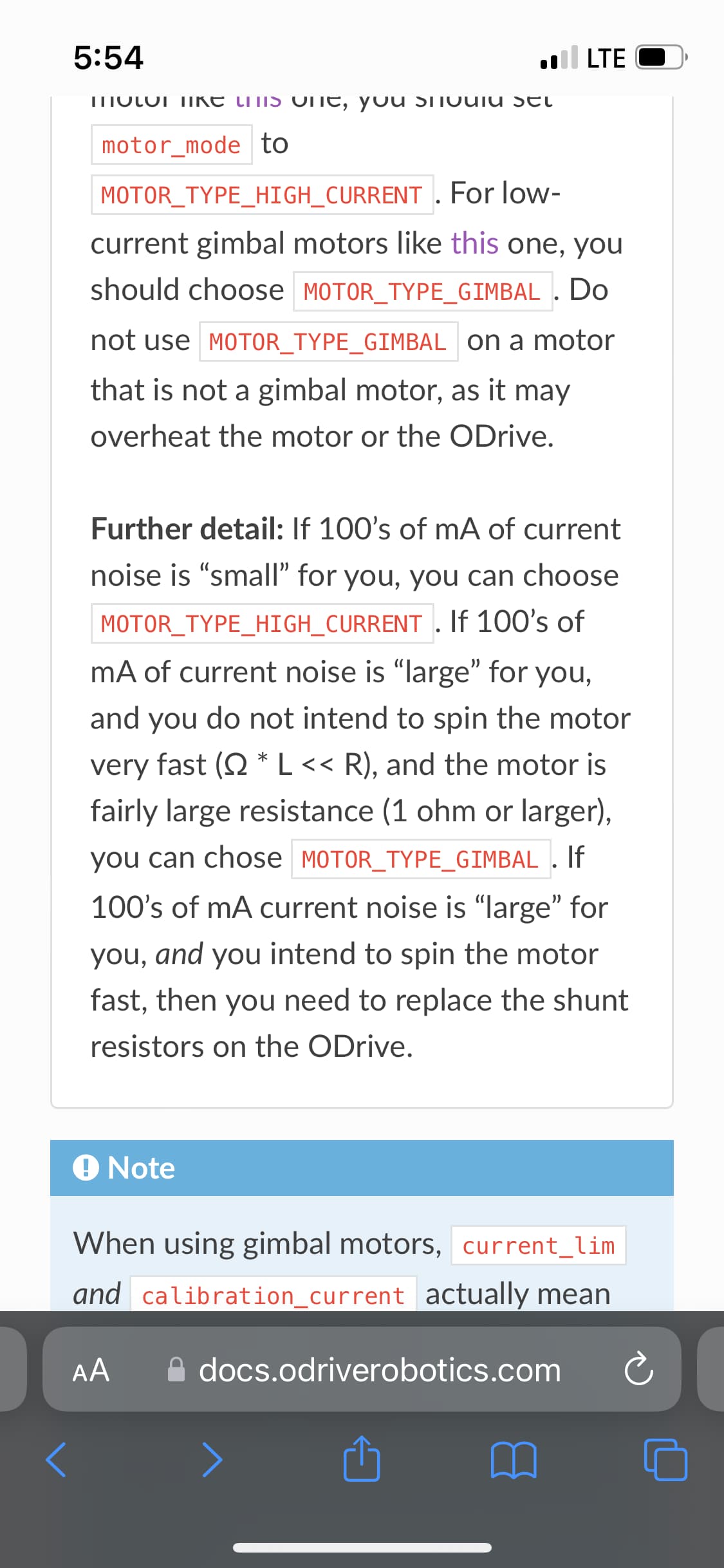
Wait what if it’s a gimbal motor
Does that mean current_lim and current_lim_tolerance mean voltage not amps
I can’t seem to find the variable current_lim_tolerance in the odrv0.axis0.motor.config directory
Is that not where it’s located?
Sorry, it’s the current_lim_margin. And yes, if it’s in GIMBAL mode that means volts.
So what am I doing wrong😔
My current_lim is 10 and my current_lim_margin is 8
Added up it’s 18
I’m giving it 12 volts
12 is below the 18
But it still gives me the current_limit_violation
When I try odrv0.axis0.request_state = axis_state_full_calibration_sequence
Ok. What’s the resistance of the motor?
The motor has a phase resistance of 0.2
So I guess I didn’t even need to be in gimbal mode because my motor is less than the 1 ohm
Right???
Yeah, just run it in high current mode.