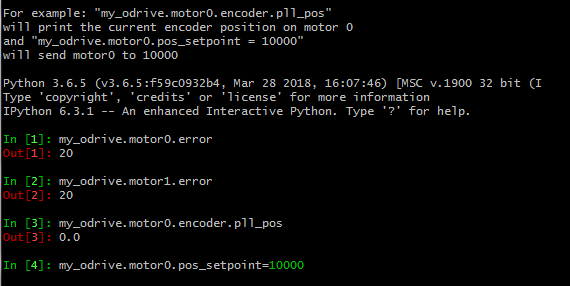
I still don’t have a successful starter motor. It’s really discouraging for me! When I set my_odrive.axisN.config.enable_control and my_odrive.axisN.config.do_calibration parameters according to the operator’s manual the output is displayed without this parameter.Then I checked the low_level.c file and found that “.enable_control” and “.do_calibration” were blocked. When I followed the instructions and entered my_odrive.motor0.encoder.pll_pos and my_odrive.motor0.pos_setpoint = 10000, the motor did not move, I can turn the motor by hand.
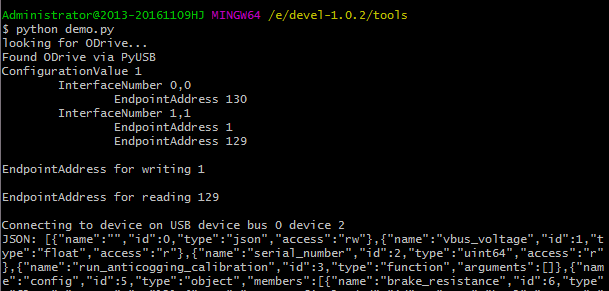
Then when I enter my_odrive.motor0.error and my_odrive.motor1.error both show error 20 (ERROR_DRV_FAULT). When I run python demo.py.
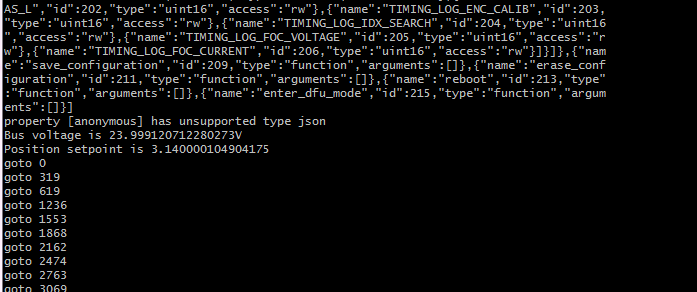
But the motor has not moved. In fact, I did not insert the motor and encoder on M1. The board is v3.4 ,the ARM chip is hotter than the DRV8301, but it can flash normally. I don’t know where the problem is.
Hi, I’m sorry getting started is being frustrating for you. Just to help me understand, when you say:
I’m not sure what you mean.
Actually that’s not a problem, this is actually because these parameters moved to axis.h/cpp. However it is true that until firmware v0.4.0 we can’t actually disable/enable the axis at runtime, it has to be through the config and then reboot. Though both are enabled by default, so you shouldn’t need to change it.
It seems your actual issue is that you are getting error 20: DRV_FAULT. To help you with that, can I ask you: What is your ODrive version v3.4 24V, or v3.4 48V? What voltage is your power supply? What are your motors?
Hi, I’m sorry I didn’t say it clearly; my ODrive version is v3.4 48V, but I use 24V and I use the mos tube is NTMFS4935NT1G. The motor is a hub motor with a maximum operating current of approximately 10A
Yes, I did it myself; I saw it before, it seems that the 48V and 24V versions only differ in the mos tube. So I configure CONFIG_BOARD_VERSION=v3.4-24V. use NTMFS4935NT
Hi,madcowswe! Thank you for your help, I will consider your opinion. Before that, I still wanted to find out why this kind of error occurred. Is it related to the chip itself?