I use the T-MOTOR P80.
The control mode uses CONTROL_MODE_TORQUE_CONTROL and INPUT_MODE_PASSTHROUGH.
Apply deceleration torque to the spinning motor, and just before it stops, Odrive displays ERROR_MODULATION_IS_NAN error and control stops.
The documentation stated that there was no explanation for this motor error.
Under what conditions does this occur, and what can I do to resolve it?
Any help is greatly appreciated.
I believe this happens when the motor saturates (max voltage). Are there any other errors?
Thanks for the reply.
This is the only error I’m getting.
Was this resolved? I’m getting a similar error in my machine:
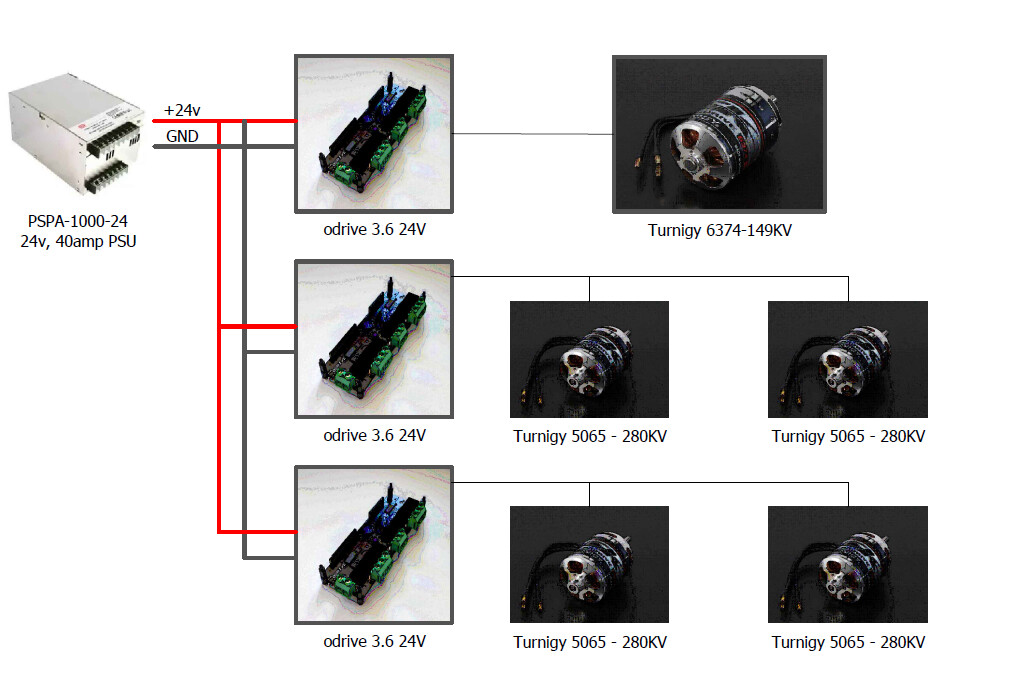
Despite reading up on it, i don’t quite get what this means? Does it mean that the speed demand > supply voltage, as I have reduced the gains and run the system through filtered position control which means the velo is never particularly high. When running through the odrivetool the motors move far quicker than when running on the machine (controlled via UART). By playing around with it, I observe:
- Occurs intermittently, some times immediately after calibration, sometimes after around 5mins of operation
- Only the 280kV motors seem to fail
- Only occurs when motors controlled from different odrives are in closed loop control.
Any help would be great!
Some more info:
- 280kV motor gains: pos 20, vel 0.05, int 0
- Upgraded to firmware 0.5.4
- vbus voltage is around 22v
This also happens to me in similar circumstances:
Firmware: 0.5.5 (seems to happen more often after upgrade, but not sure)
2* GARTT ML5010 300KV
CONTROL_MODE_TORQUE_CONTROL
ABZ magnetic encoders (MA330 Magnetic Angle Sensor Breakout R2 – Tinymovr)
Voltage around 19V
What other info should I provide? Thanks!
system: no error
axis0
axis: Error(s):
AxisError.MOTOR_FAILED
motor: Error(s):
MotorError.MODULATION_IS_NAN
DRV fault: none
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: Error(s):
AxisError.MOTOR_FAILED
motor: Error(s):
sensorless_estimator: no error
encoder: no error
controller: no error