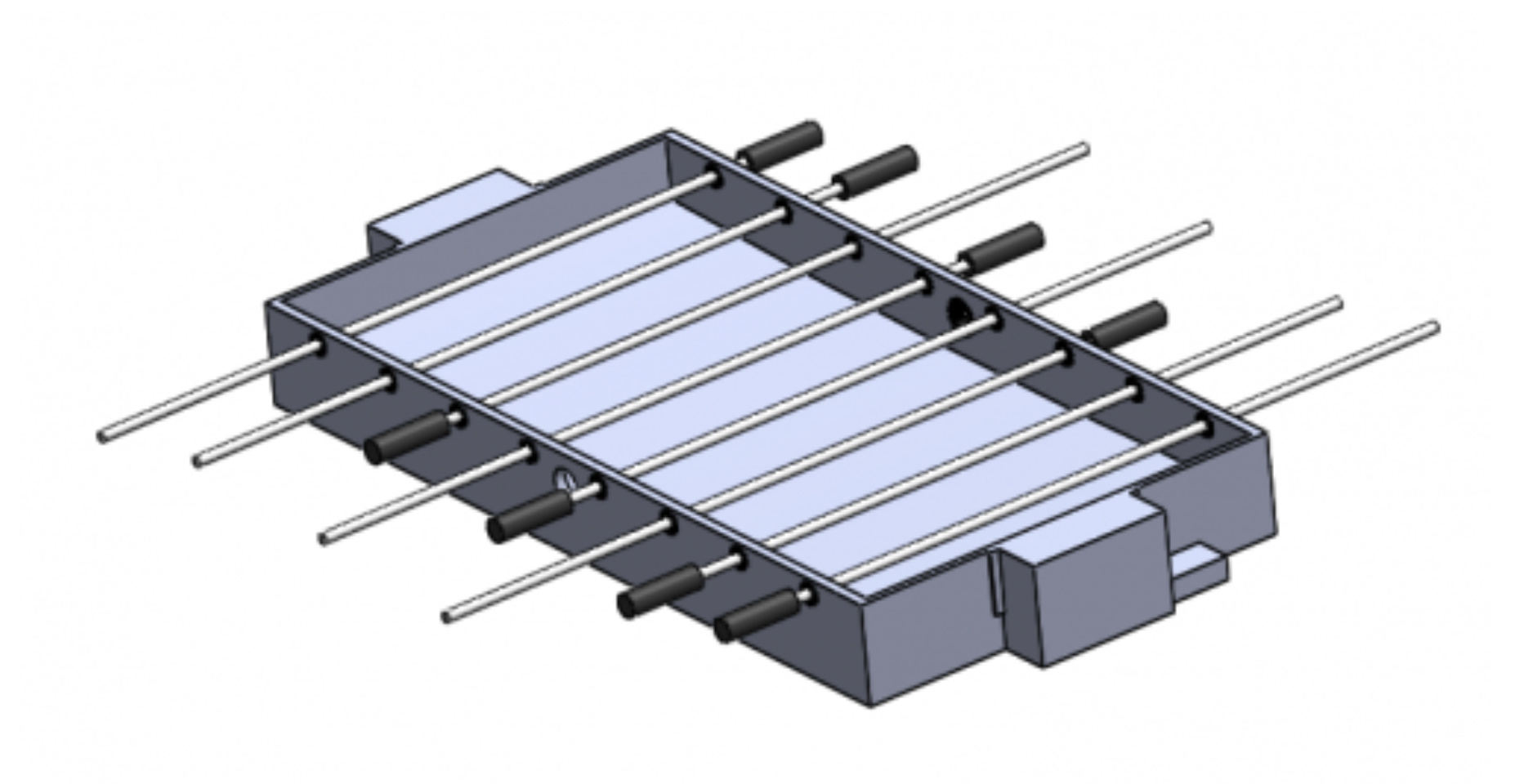
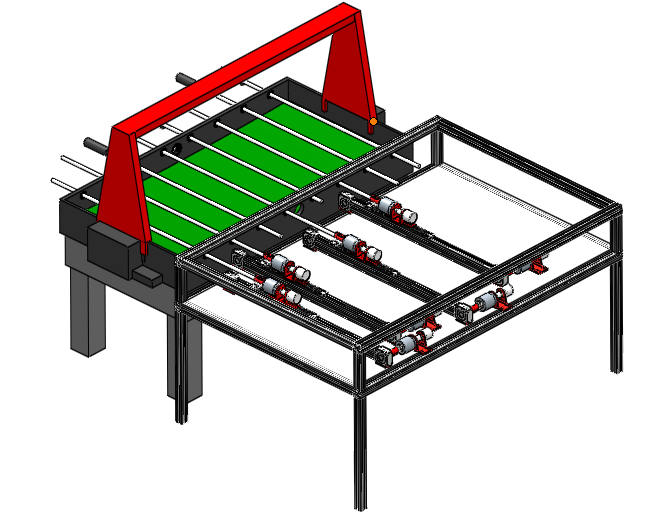
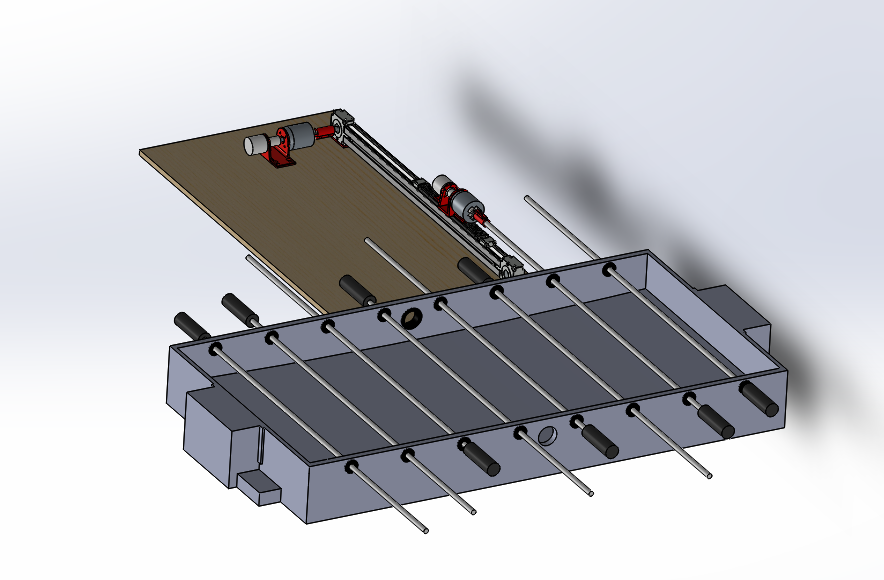
Over the past little while, myself and a few of my classmates have been working on creating robotic foosball for our fourth year design project using the ODrive V3.3 and stock motors and encoders. We just finished a demo of a single functioning rod.

The CAD of our demo setup is seen below. Ideally we will clamp the board down for other tests, as the board moves quite a bit when testing as seen above.
We have a website where we will post content in addition to on this forum:
The project is due in March, so now that we have completely motion for 1 rod, we will be replicating the motion to complete the setup. We plan on using a ZED camera for ball detection.