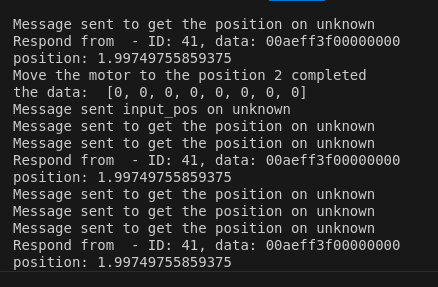
I want to get the Encoder Estimate of the ODrive through python but the result of it still 2 although the motor has turn from 2 to 0.
I have send the message Get Encoder Estimates from my laptop to the ODrive through Canable V2.0, baudrate = 500000.
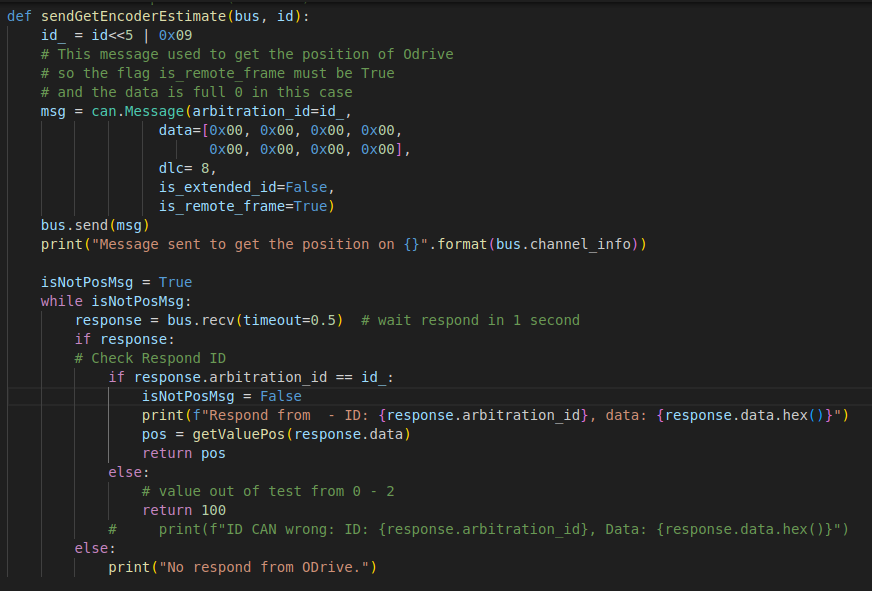
This is the code I use to send the message Get Encoder Estimates:
And the code I test:
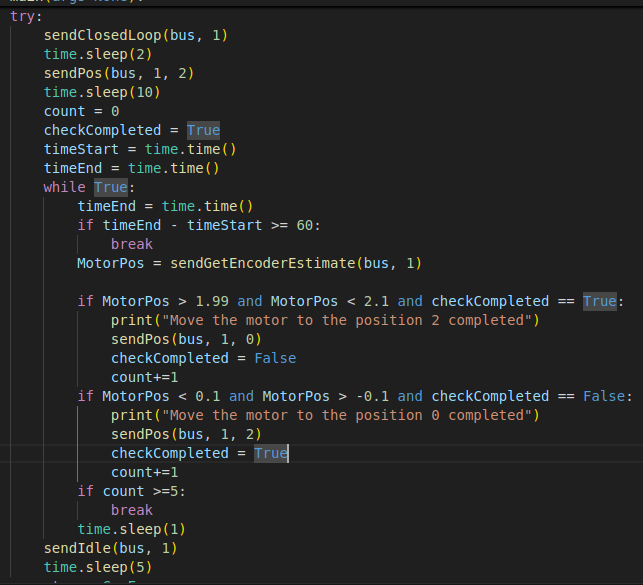
I want to get the position of the motor to know when it turn completed but the value return not decrease slowly but still 2 when I want the motor from position 2 to 0.
I check with the terminal, the encoder_estimate can return the right value.