The docs say:
Note: When using gimbal motors, current_lim and calibration_current actually mean “voltage limit” and “calibration voltage”, since we don’t use current feedback. This means that if you set it to 10, it means 10V, despite the name of the parameter.
My question is, are there any OTHER properties that are affected? or is it just those 2? (current margin??) And for any read only values talking about current now voltage?
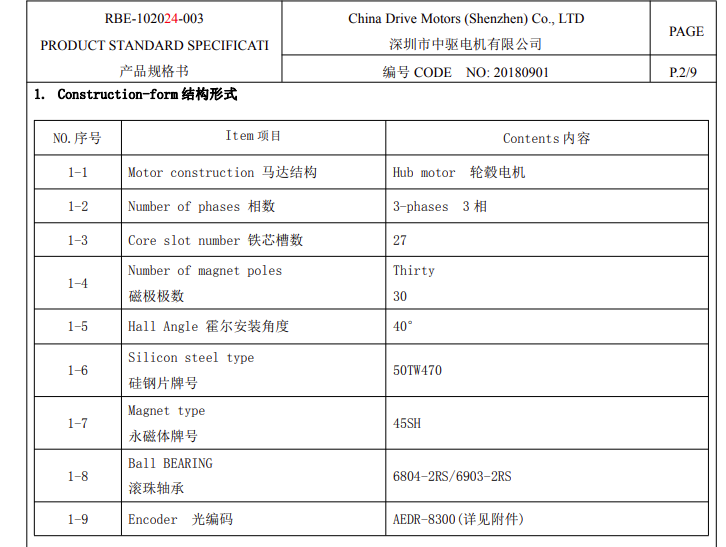
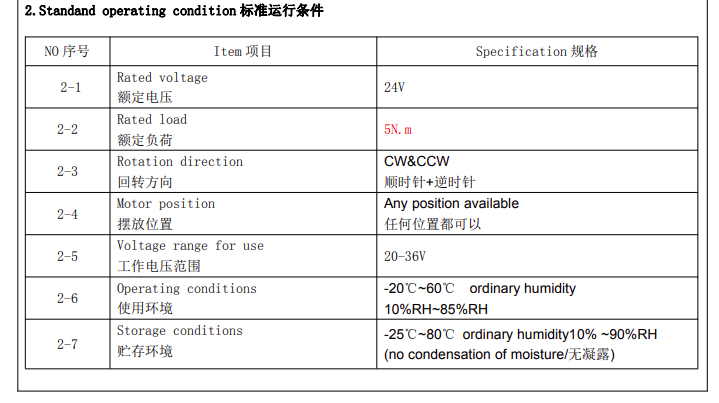
Also, my hub wheel motor seems to work fine in either mode. Should I be ‘worried’ about using gimbal mode, and if so, what properties should I take care to ‘limit’ and ‘monitor’.? And spec sheet says 20-36 V so I should set current_lim to 36? calibration_current i have at 10 i think. higher values like 24 pulled too hard and got error.
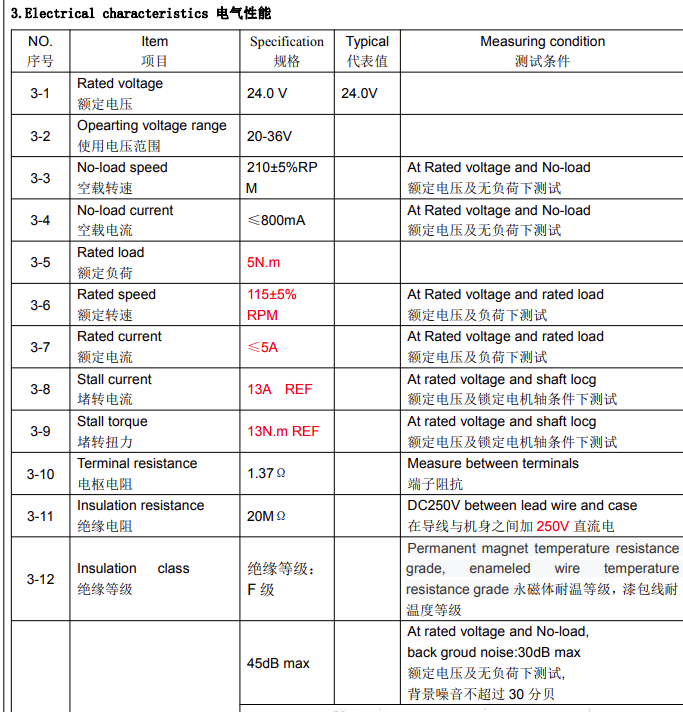
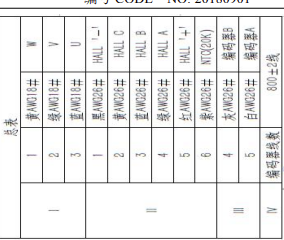
as a side note, above it mentions NTC(20K). is that a temp sensor? if so how would I wire that into Odrive and what value would I put as a limit?