Hi,
I want to use two odrives with one power supply, controlled by one PC, with the PC connected via a usb isolator and a usb hub (see pic). Will this protect against ground loops?

Thanks,
Luke
Hi,
I want to use two odrives with one power supply, controlled by one PC, with the PC connected via a usb isolator and a usb hub (see pic). Will this protect against ground loops?
Thanks,
Luke
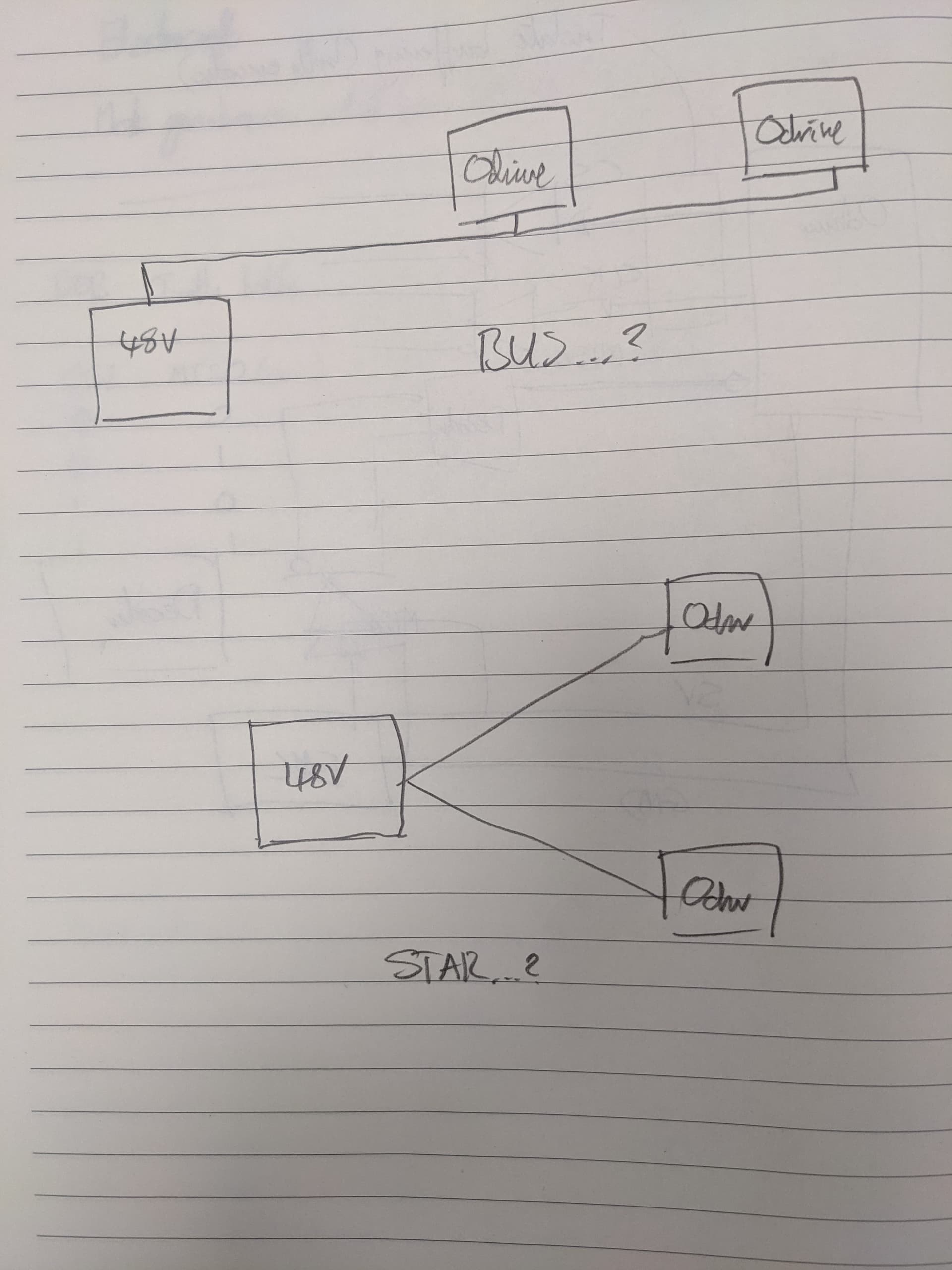
Yes, you should be ok. There is still a possible ground loop between the two ODrives via the USB hub, but this is a much smaller loop - just make sure that your power cables are both low resistance and low inductance. Keep the positive and negative wires close together or twisted to minimise inductance, and wire them as a bus, rather than a star.
If you get USB comms issues, I would recommend CAN. e.g. with one of these isolated USB-to-CAN adapters: https://www.amazon.co.uk/USB-Converter-Module-Raspberry-Zero/dp/B07Q812QK8
I’d also recommend using ferrite rings on your motor wires.
Hi Luke,
I have used ODrives in a very similar topography as you and have now fixed all communications problems
I spent a LOT of time trying to fix what I thought were ground errors and random but frequent USB communications errors. I solved these issues by adding ferrite rings to the motor controller phase cables. seem to have solved my problems. After introducing the ferrite rings I have been able remove the three USB isolators from my project.
See this link for my solution:
USB comms going down with 48V power supply
Good luck and let us know how you go with this fix.
Cheers, Tim.
Hi,
I can confirm I’m having no issues using two odrives with my original scheme as per my first post. The power input cables are laid out in a bus pattern.
-Luke
Hello!
Im thinking this might help me with my connection issues but Im still not sure how to wire the odrives in a BUS pattern. Does it mean connecting the negative from the first odrive to the second and the negative from the second back to the power supply?
Thanks very much!
TBH, I think the main reason that this problem was solved, was because of the use of ferrite rings on the motor outputs. Definitely use ferrites.
But as for your question “what does a bus pattern mean?” I mean:
Connect + on the PSU to + on the first ODrive. Connect + on the first ODrive to + on the second. ...
Connect - on the PSU to - on the first ODrive. Connect - on the first ODrive to - on the second. ...
Electrically, this is identical to wiring all of them separately to the PSU. But it reduces the resistance & inductance (slightly) between each ODrive.
Im already using ferrite rings that match the ones in the odrive store, I have braided the motor wires and looped them around the rings 3 times. The connection problems are less frequent but not fully gone. Because of the layout of my build I have my power supply about 2ft away of three odrives that are layed out side by side, this will reduce my wiring by quite alot!
Thanks very much for taking the time to answer!
Towen,
I just got my second odrive56 which I want to use on my Donkey project. If the battery power is located
centrally (equal distance) from the two Odrives for weight balance would you still advise using your ‘bus pattern’?
luke,
thanks for the hub idea, I have a jetson nano controller that has four usb sockets but if I can save one for other sensors that will be a bonus
one more question, usb cables come in different lengths does a longer cable have the chance to increase ground loop problems?
Thanks!
No, i’d say only do that if it makes sense from a cable management point of view. I don’t think it’s important enough to override other design considerations.
But do make sure that you have ground well-connected, never allow the power to be connected without the ground.
Thanks towen,
This is new territory for me and like to cover all bases.