Hi I’m controlling a hoverboard motor with odrive 3.6.
I successfully finished calibrating the motor parameters and was one step before fully controlling the motor.
However, I got errors while doing this:
dev0.axis0.requested_state = AXIS_STATE_ENCODER_HALL_POLARITY_CALIBRATION
the error says: ILLEGAL_HALL_STATE
I went over the docs to find what makes the error and it was because the signals from the hall sensor was 000 or 111.
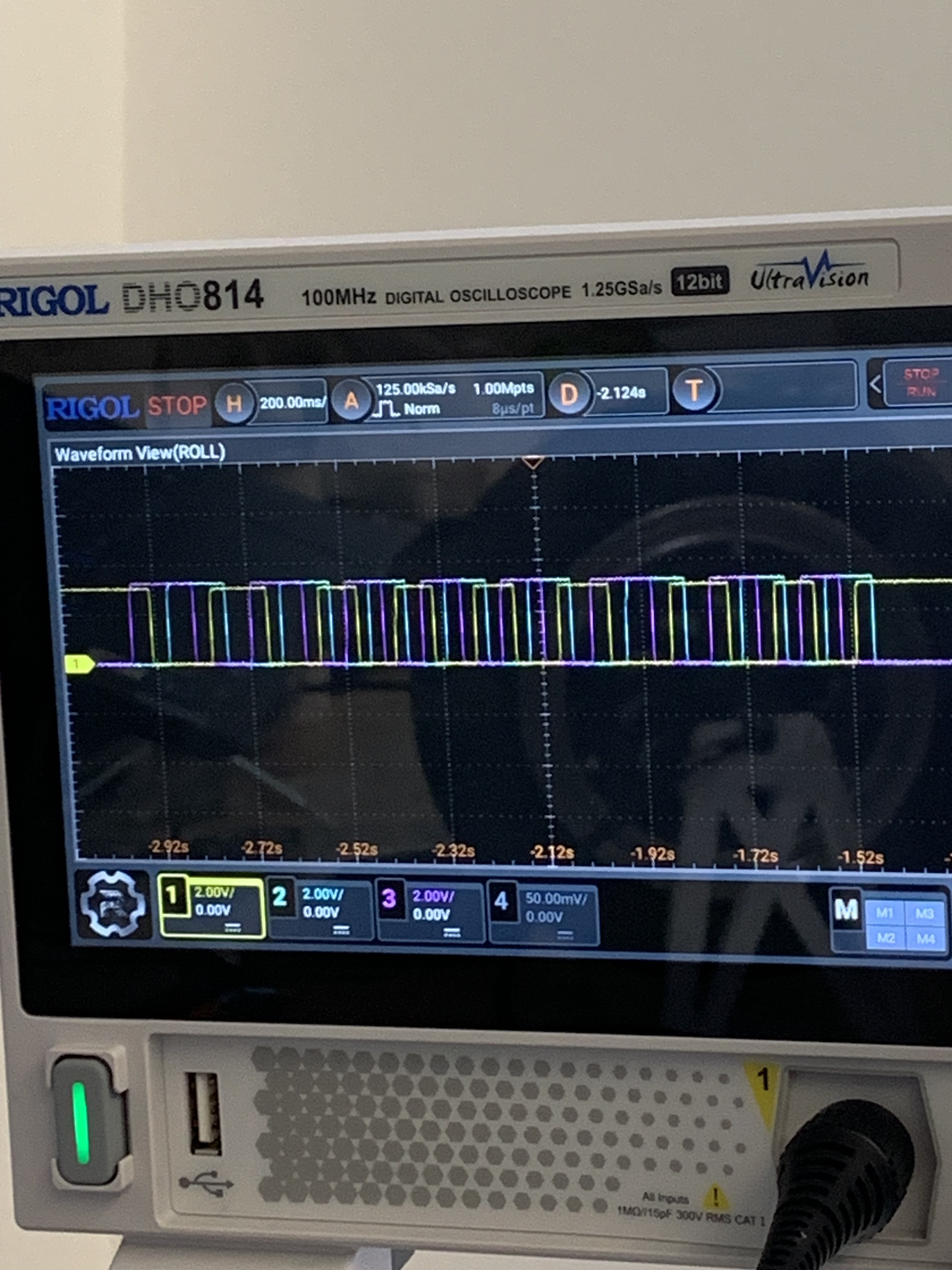
so I checked the hall sensor signal with my oscilloscope and compared to see the noise when the motor was rotating.
When I rotated with my hand:
When the motor was rotating:
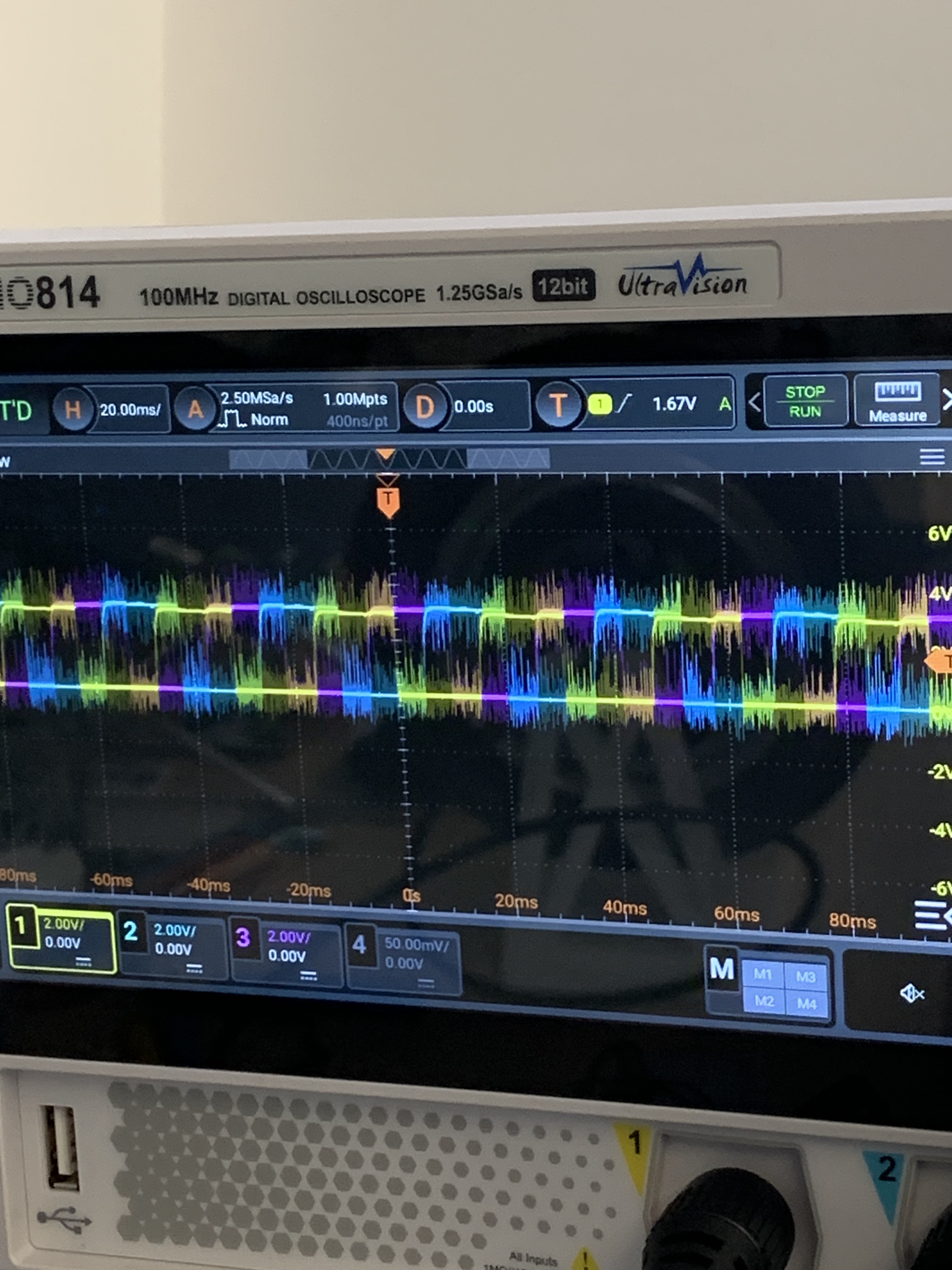
It seems like there’s a significant noise generated by the motor since the hall sensor is really close to the runner and stator.
I used 100nF caps to filter some noise but I couldn’t eliminate it completely. (recommended cap value was 22nF but I didn’t have them near me)
So, will this problem be fixed with 22nF caps or are there any other solutions?
+)
I also live plotted the hall_state and it looks like this:
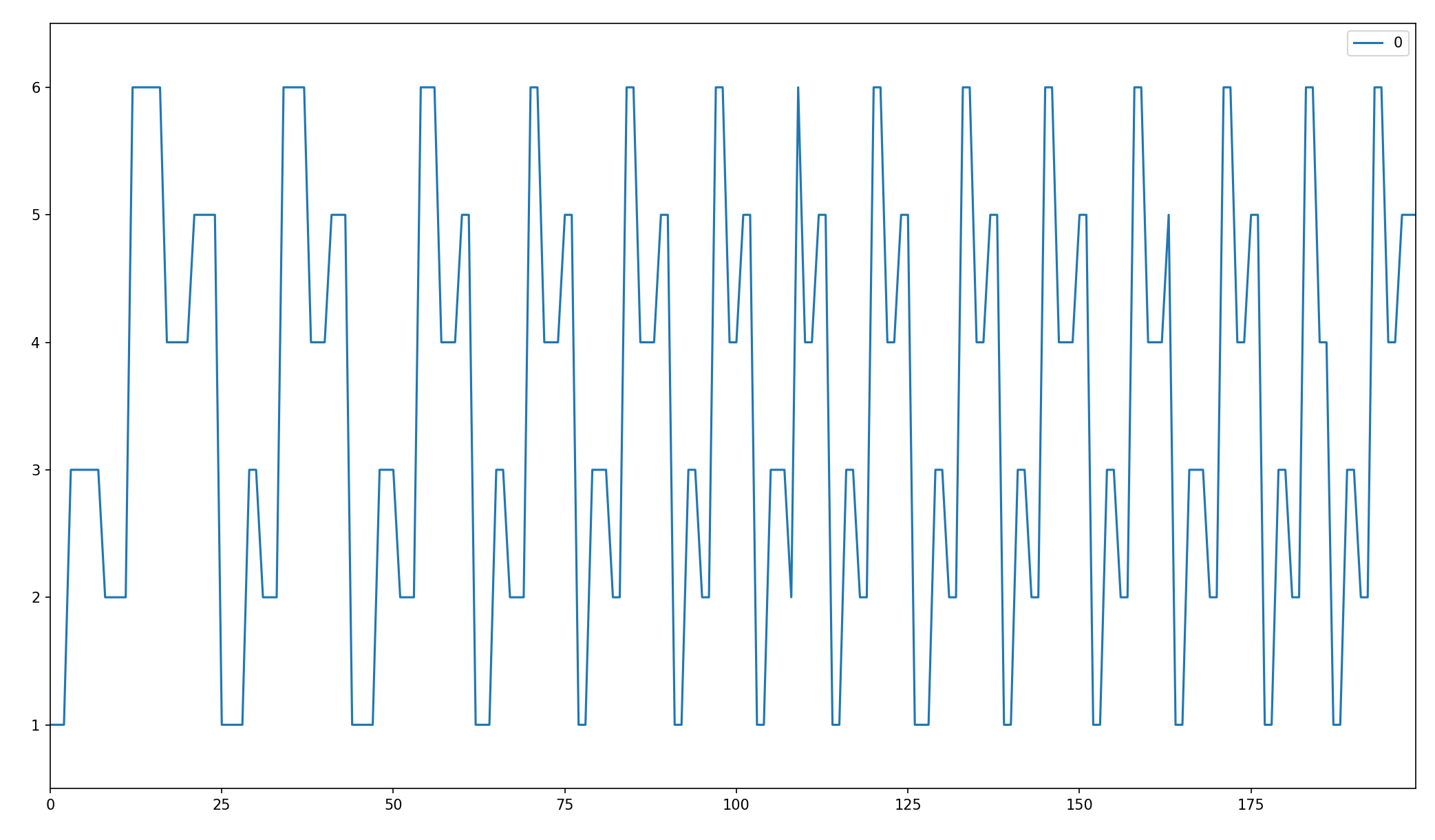
It seems fine and I can never see any 000 or 111 which is 0 and 7 in decimals.
Can other reasons make this issue?