Hi All
I want to handle the exception if the USB is accidentally unplugged. Sometimes the exception occurred without the USB unplugged. I have no way of replicating the issue. That’s why I would like to deal with it
from approxeng.input.selectbinder import ControllerResource
from fibre.protocol import ChannelBrokenException
from usb.core import USBError
from datetime import datetime
import odrive
import threading
Amp_motor = 45
print("Waiting for odrive....")
odrv0 = odrive.find_any() #program stop here unless odrive is found
print("Found odrive!")
lm = odrv0.axis0
rm = odrv0.axis1
maxSpd = 30
minSpd = 10
pivotthreshold = .5*maxSpd
if( (lm.encoder.is_ready != True) or (rm.encoder.is_ready != True)):
#right motor
rm.controller.config.vel_gain = 0.0567
rm.controller.config.vel_integrator_gain=0.5
rm.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION
rm.controller.config.control_mode = CONTROL_MODE_VELOCITY_CONTROL
rm.controller.config.vel_limit = maxSpd + 20
rm.controller.config.vel_ramp_rate = maxSpd
rm.controller.config.input_mode = INPUT_MODE_VEL_RAMP
rm.motor.config.current_lim = Amp_motor
rm.motor.config.direction = -1
#Left motor
# time.sleep(10)
lm.controller.config.vel_gain = 0.0567
lm.controller.config.vel_integrator_gain=0.5
lm.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION
lm.controller.config.control_mode = CONTROL_MODE_VELOCITY_CONTROL
lm.controller.config.vel_limit = maxSpd + 20
lm.controller.config.vel_ramp_rate = maxSpd
lm.controller.config.input_mode = INPUT_MODE_VEL_RAMP
lm.motor.config.current_lim = Amp_motor
lm.motor.config.direction = 1
while True:
try:
with ControllerResource(dead_zone=0.1, hot_zone=0.2) as xbox:
print("xbox connected")
while xbox.connected:
presses = xbox.check_presses() # debug
lm.controller.input_vel,rm.controller.input_vel = mixer(yaw= -xbox['lx'] ,throttle= -xbox['ly'], max_power=maxSpd)
if xbox.presses ['dup']:
pass
if xbox.presses ['cross']:
rm.requested_state = AXIS_STATE_IDLE
lm.requested_state = AXIS_STATE_IDLE
# raise robotStopException()
if xbox.presses ['circle']:
rm.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
lm.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
if xbox.presses ['square']:
pump.set_servo_pulsewidth(OUT_GPIO,500)
if xbox.presses ['triangle']:
pump.set_servo_pulsewidth(OUT_GPIO,1500)
# print("adqwfqfqfq")
if xbox.presses ['home']:
print(odrv0.vbus_voltage)
print("Left [{} , {}]".format(lm.motor.current_control.Iq_measured , lm.motor.current_control.Iq_setpoint))
print("Right [{} , {}]".format(rm.motor.current_control.Iq_measured , rm.motor.current_control.Iq_setpoint))
if xbox.has_presses:
print(xbox.presses)
print("Connection to joystick(s) lost")
except (ChannelBrokenException, USBError):
print("channel broken.Retrying...")
odrv0 = odrive.find_any()
print("Found odrive!")
time.sleep(1.0)
After I replug the USB, this what appeared in the shell:
channel broken.Retrying...
USB device init failed (bus 1, device 14). Ignoring this device. More info: Traceback (most recent call last):
File "/usr/local/lib/python3.7/dist-packages/fibre/usbbulk_transport.py", line 196, in discover_channels
bulk_device.init()
File "/usr/local/lib/python3.7/dist-packages/fibre/usbbulk_transport.py", line 50, in init
self.dev.reset()
File "/usr/local/lib/python3.7/dist-packages/usb/core.py", line 947, in reset
self._ctx.managed_open()
File "/usr/local/lib/python3.7/dist-packages/usb/core.py", line 113, in wrapper
return f(self, *args, **kwargs)
File "/usr/local/lib/python3.7/dist-packages/usb/core.py", line 131, in managed_open
self.handle = self.backend.open_device(self.dev)
File "/usr/local/lib/python3.7/dist-packages/usb/backend/libusb1.py", line 804, in open_device
return _DeviceHandle(dev)
File "/usr/local/lib/python3.7/dist-packages/usb/backend/libusb1.py", line 652, in __init__
_check(_lib.libusb_open(self.devid, byref(self.handle)))
File "/usr/local/lib/python3.7/dist-packages/usb/backend/libusb1.py", line 604, in _check
raise USBError(_strerror(ret), ret, _libusb_errno[ret])
usb.core.USBError: [Errno 5] Input/Output Error
Found odrive!
xbox connected
Traceback (most recent call last):
File "/home/pi/Desktop/megaBOT_neo.py", line 130, in <module>
lm.controller.input_vel,rm.controller.input_vel = mixer(yaw= -xbox['lx'] ,throttle= -xbox['ly'], max_power=maxSpd)
File "/usr/local/lib/python3.7/dist-packages/fibre/remote_object.py", line 245, in __getattribute__
return object.__getattribute__(self, name)
AttributeError: 'RemoteObject' object has no attribute 'controller'
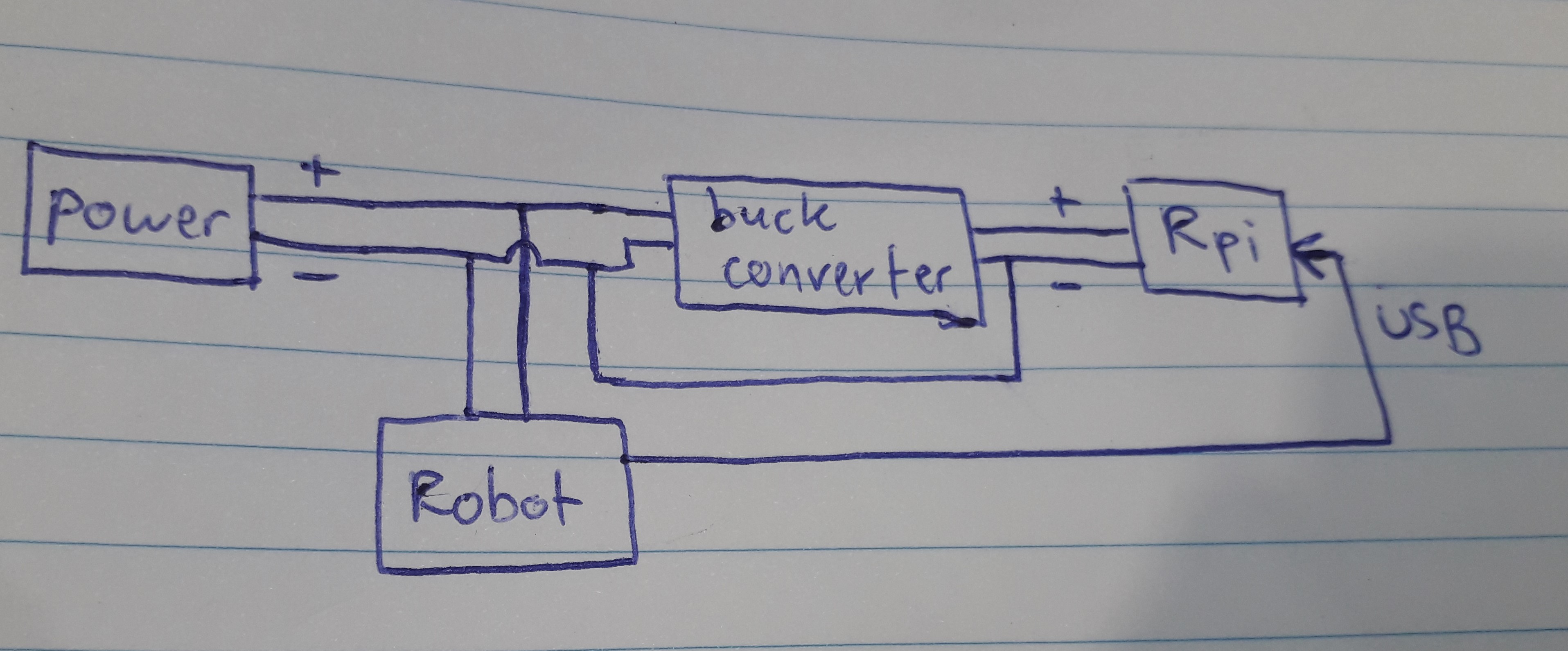
First, I had my raspberry pi share the same power source as the odrive. Then I tried with separate power source for the pi and odrive. In both cases, the error persist.
Any idea how to handle the exception properly without triggering AttributeError?