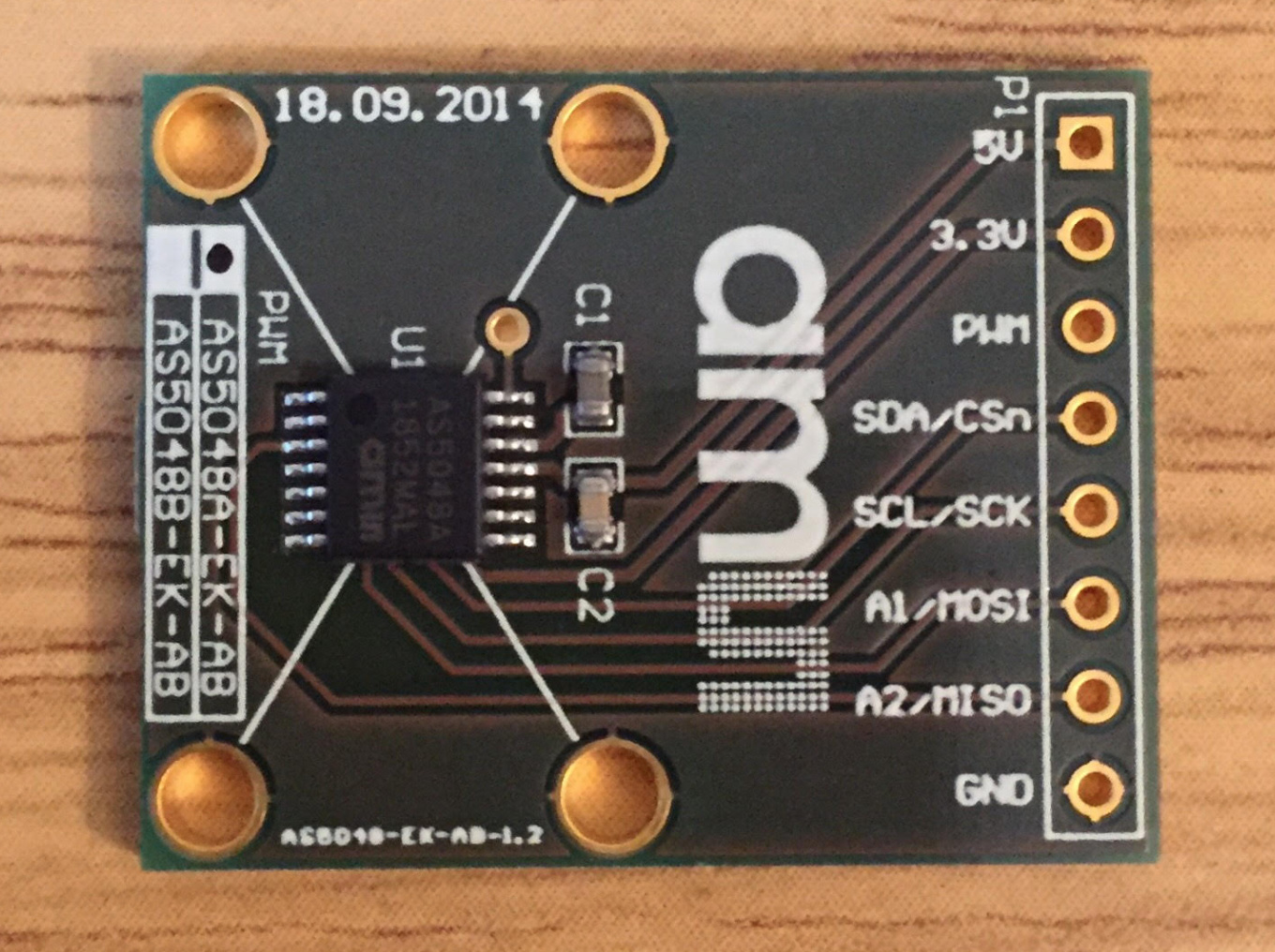
Hello! Could I ask for some help? Complete beginner here, trying not to break my first Odrive . I’m stuck on connecting my encoder, pictured. What are the corresponding connections for A,B,Z , please?
Take a look at the last few lines of this webpage
# Encoders
## Known and Supported Encoders
Be sure to read the [ODrive Encoder Guide](https://docs.google.com/spreadsheets/d/1OBDwYrBb5zUPZLrhL98ezZbg94tUsZcdTuwiVNgVqpU).
## Encoder Calibration
Please take into account that all encoder types supported by ODrive require that you do some sort of encoder calibration. This requires the following:
* Selecting an encoder and mounting it to your motor
* Choosing an interface (e.g., AB, ABI or SPI)
* Connecting the pins to the odrive
* Loading the correct odrive firmware (the default will work in many cases)
* Motor calibration
* Saving the settings in the odrive for correct bootup
### Encoder without index signal
During encoder offset calibration the rotor must be allowed to rotate without any biased load during startup. That means mass and weak friction loads are fine, but gravity or spring loads are not okay.
In the `odrivetool`, type `<axis>.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION` <kbd>Enter</kbd>.
To verify everything went well, check the following variables:
show original
1 Like
Thanks for taking the time , Riewert. This is a big help.
1 Like