I am giving to my project a different approach and I just want to compare the way you interact odrive-teensy…Can you please share the teensy code you are currently using ?
Thanks
I am giving to my project a different approach and I just want to compare the way you interact odrive-teensy…Can you please share the teensy code you are currently using ?
Thanks
Hello.
My previous sketch was not very interesting because I just used odrive.SetPos.
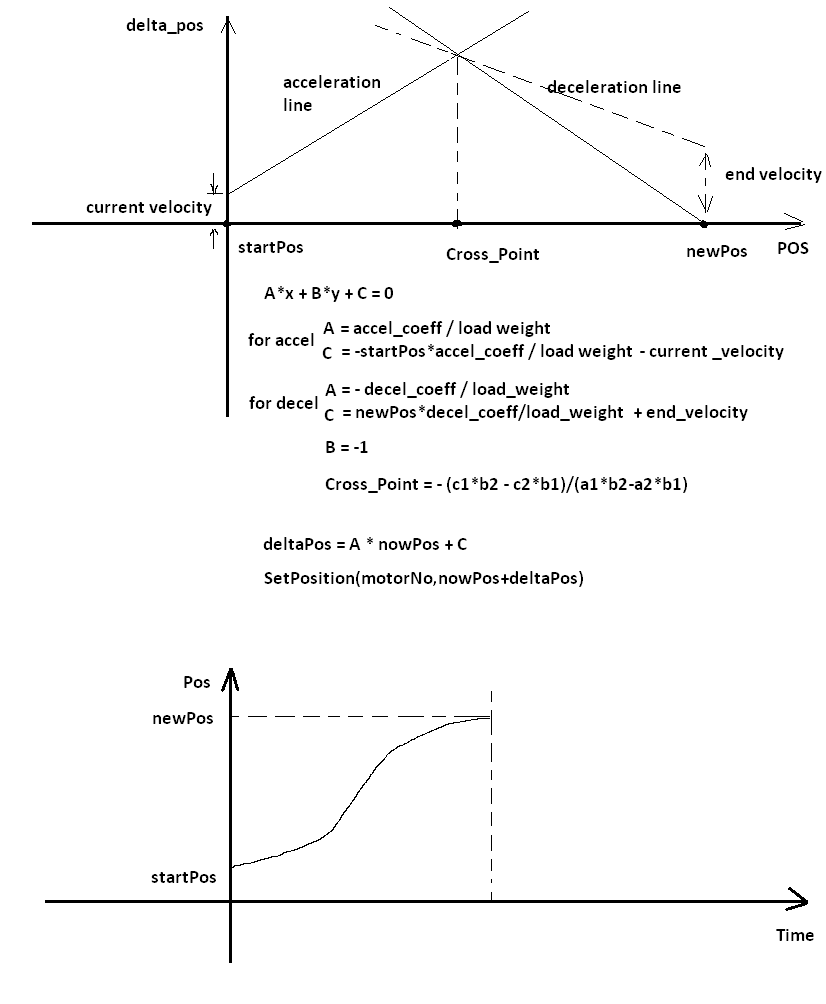
I tried to make an algorithm for smooth motion using linear dependence on the current position.
Here is the sketch with teensy code (odrive,serial<->PC,threads) https://cloud.mail.ru/public/5RNv/DepjmLEFH
Here is the explanation of algoritm
Here is the smooth moving at the maximum speed of which I managed to achieve
Thank you for help, i made 3xmotor manipulator.
Now I will move on and combine it with the object recognition and gripper.
Please help ! On one of my Odrive the current get low suddenly.
On this Odrive the firmware has recently erased for unknown reason, but after reflashing it worked normally for a week.
After current low happened I measured the current consumption at current_lim = 40a my other good and this bad Odrive.
Here is the video (in the video, I pull the motor connected to good Odrive - the current up to 19a and turn the vertical motor bad Odrive - the current is 2 times less).
I can’t measure the peak current unfortunately but I think that it was big because this motor was experiencing the highest loads when turning.
Here is the video one of the last tests (cur_lim=40a, vel_lim=80000).
I know that these symptoms occur when the wires from the motor to the terminals M0, M1 are poorly connected, but I checked everything.
After this happened, I connected the motor from bad to good Odrive - everything works fine.
After this I connected the motor from M0 to the free contacts M1 of bad Odrive - everything began to work normally, but after about an hour of work everything became just like on M0 (low current too and weak strength)
I disconnected the Odrive, checked the wires, removed the cooling radiator and connected the N5065.
At current of 40a the resistance force is minimal. The current meter does not even show the value. I rechecked the N5065 with other (good) Odrive - everything works fine (current meter shows values and resistance force is good).
Both Odrive are powered from one wire and power source. I also reflashed firmware the bad Odrive - no results.
Here is the video with N5065(current_limit 40a). Almost no resistance force.
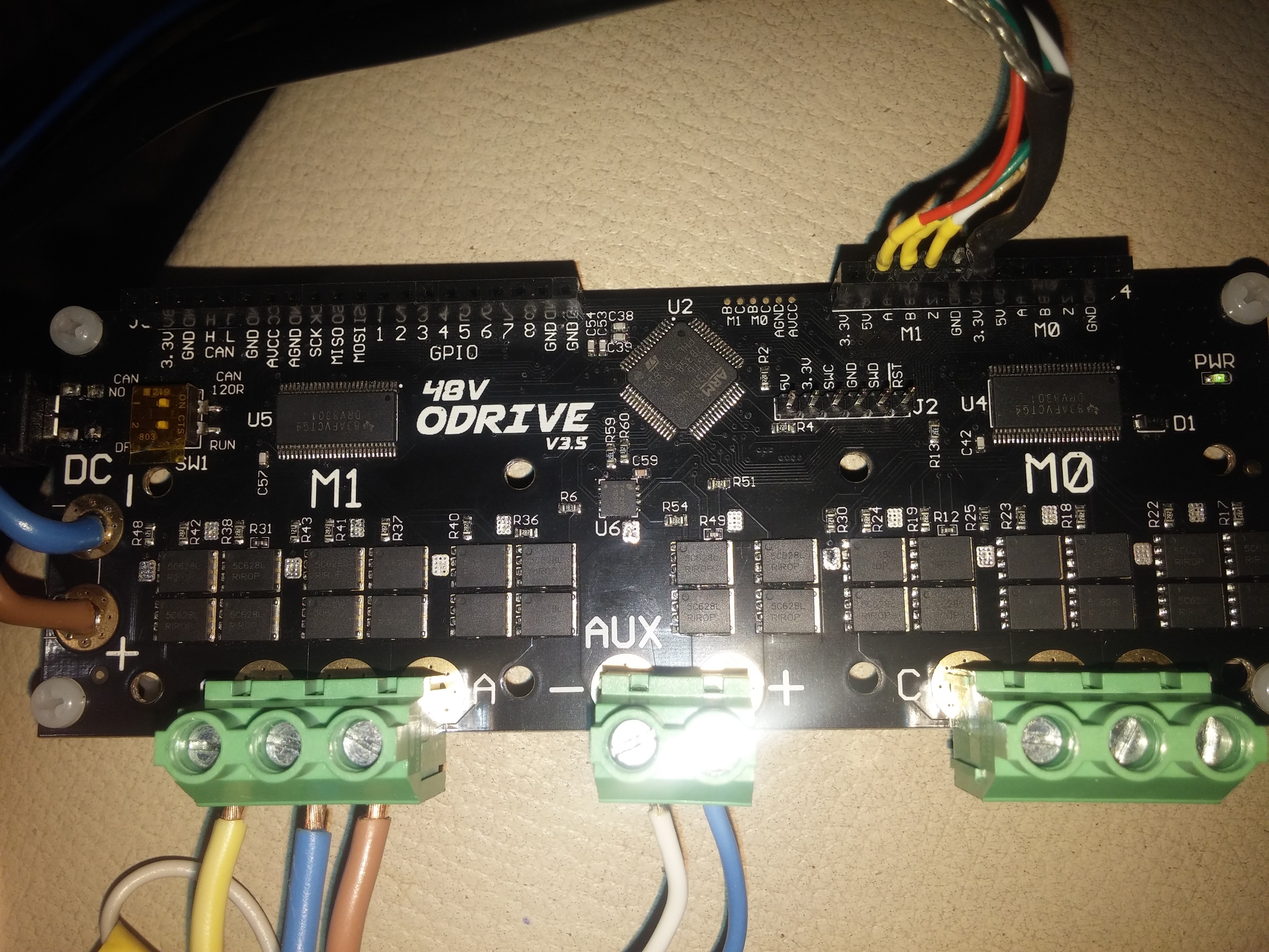
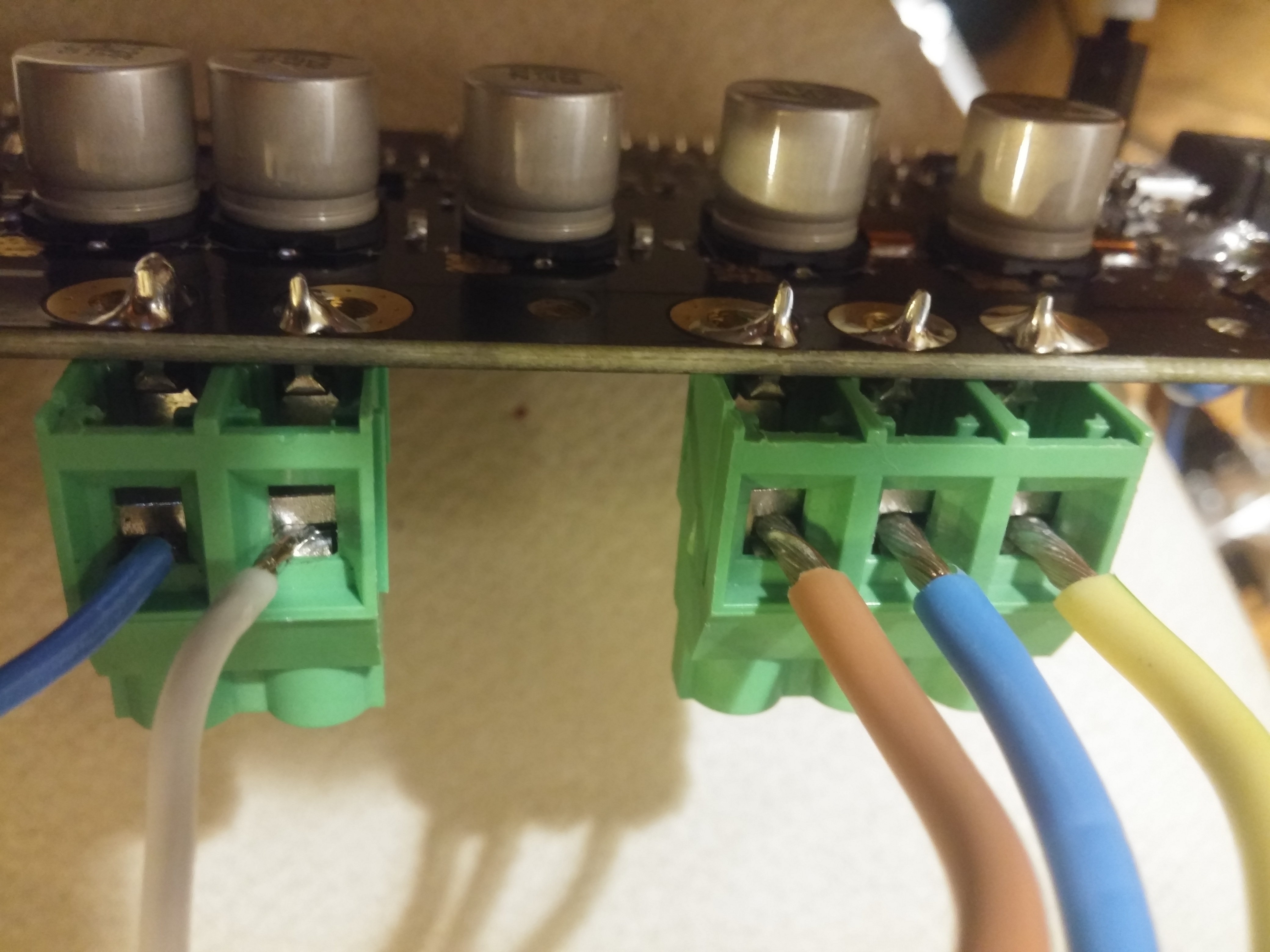
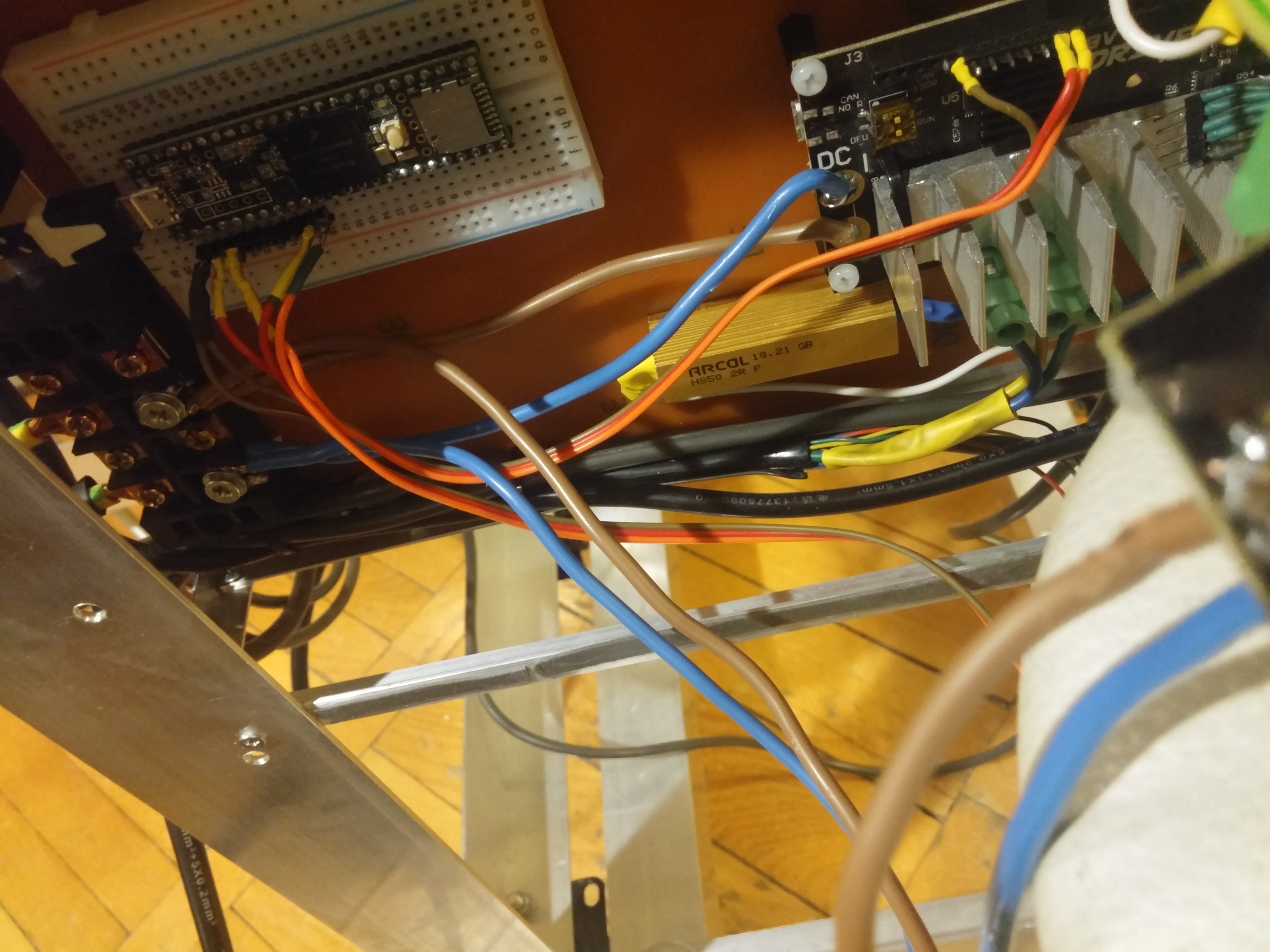
Here is the photos of wires and bad Odrive
If it is difficult to explain the reason, I am ready to send it for inspect, because the same thing can happen with my next Odrive and we need to find out the reason.
This is very important for my entire project.
I can send you a new ODrive, can you send that one back and I will inspect it. Please email info@odriverobotics.com to arrange the replacement.
Do you monitor the temperature of the ODrive? You can do it with:
Firmware version 0.4.7 and earlier:
start_liveplotter(lambda:[odrv0.axis0.get_temp(), odrv0.axis1.get_temp()])
After that version it is:
start_liveplotter(lambda:[odrv0.axis0.motor.get_inverter_temp(), odrv0.axis1.motor.get_inverter_temp()])
I sent the parcel with the controller.
Thanks for the information about the temperature, now I will constantly control it, but for the broken one, I think there is no point in checking it now.
I did not check whether the mosfets are pierced with the tester.
And if this is so, then maybe it makes sense to release another version of the odrive with vertically oriented mosfets so that you can organize a better cooling and easy replacement.
Hello.
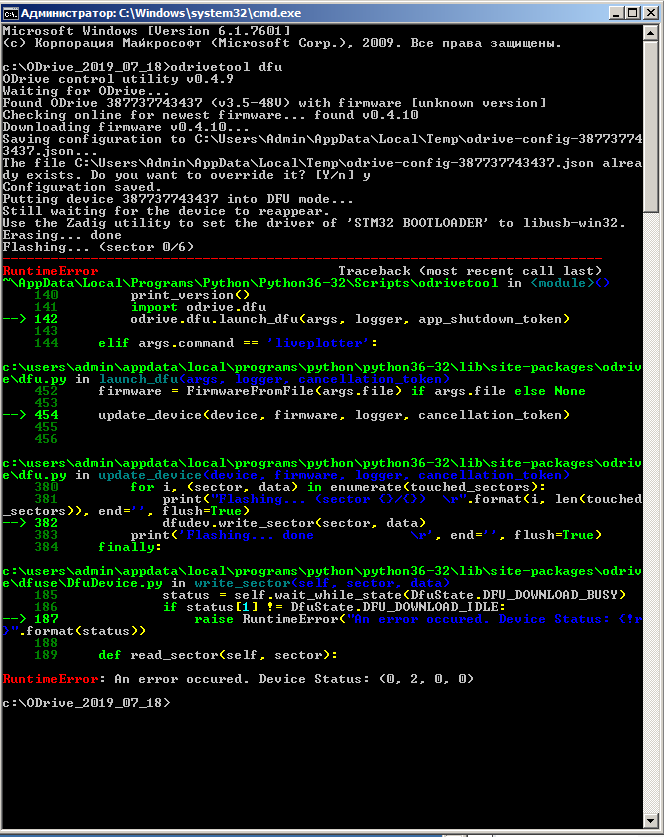
I keep working with ODrive and decided to update the firmware so that I can monitor the temperature. But I’ve got errors when flashing through odrivetool.
What do I need to do to fix them?
I have Odrive 3.5 48V
After these errors, Odrive disappeared from the system and was no longer visible in USB devices.
I had to flush my old firmware version 0.4.1 with stlink and it worked again.
An attempt to firmware the latest versions 0.4.10, 0.4.9 and the required 0.4.2 in which the temperature control appeared gives me the same error