Cool. I’ve been researching machine learning quite a bit lately so I’ll be curious how that works. My initial plan was to solve this a bit more explicitly from the physics of the situation. I am also curious how ML would be on just also helping to find an optimal gait via one of the algorithms like a genetic algo.
If you haven’t seen this already, here’s a seminar by the founder of Agility Robotics (the company that built Cassie) about the hardware and controls for walking. They’re using series-elastic actuators with real springs, but you could get it to work for direct- or quasi-direct-drive actuators by programming them to act like springs.
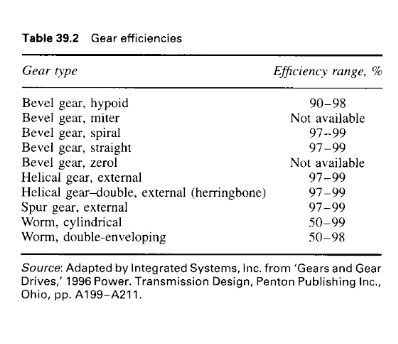
Apparently the efficiency of spur gears and helical gears is about the same according to this source. However its not clear from the book if this is only true for systems that are well lubricated and so this may not be true for your situation.
Still, if you end up sticking with 3D printed gears it may be worth comparing the efficiency at some point. If the herringbone design is roughly the same efficiency then it would make sense to stick with that design due to its other advantages like lower noise, higher load capacity, less backlash etc.
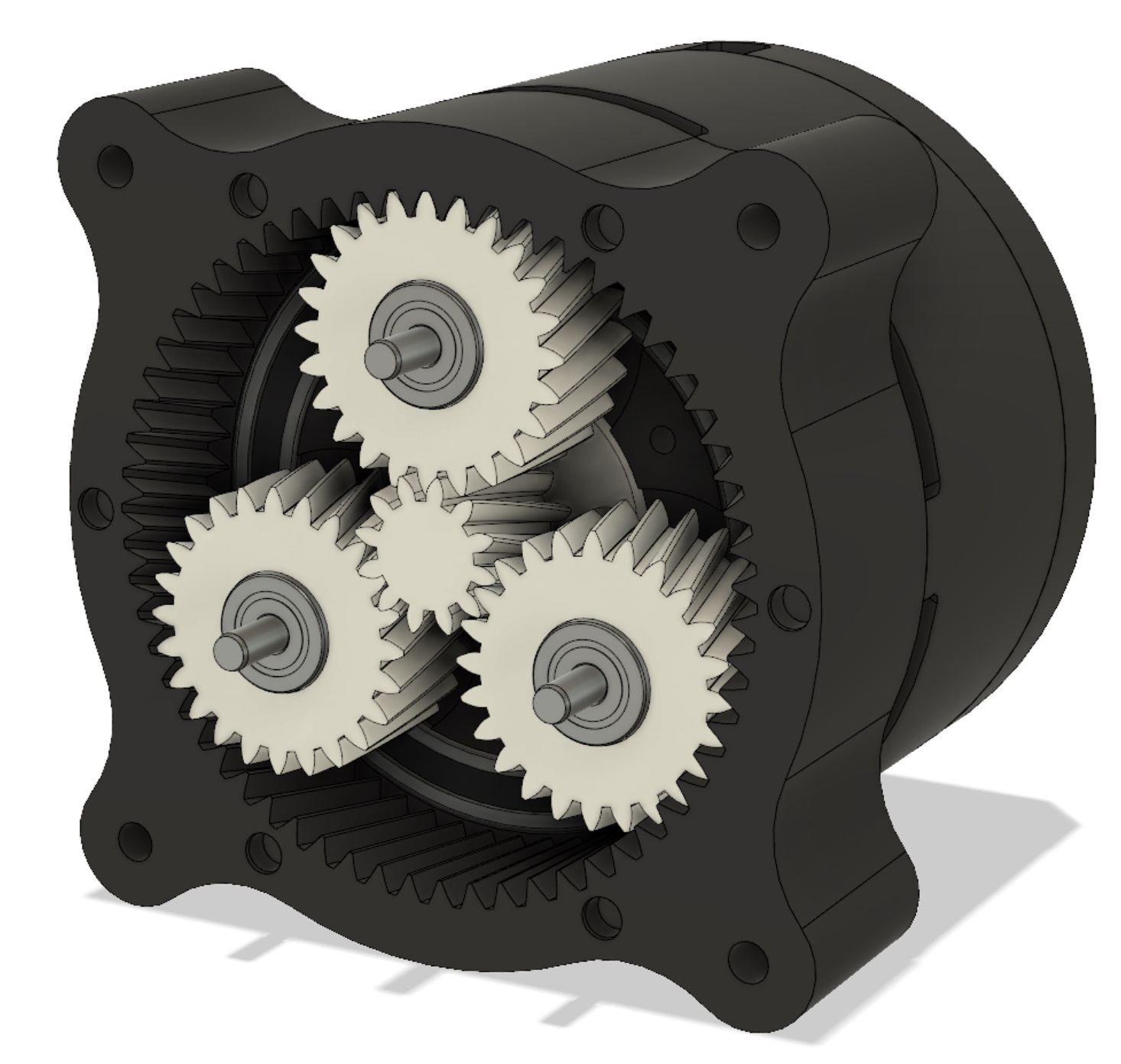
Interesting. I didn’t like the herringbone gears since they complicated the assembly process and required splitting the ring gear into 2 parts, but a helical gear could be a good compromise.
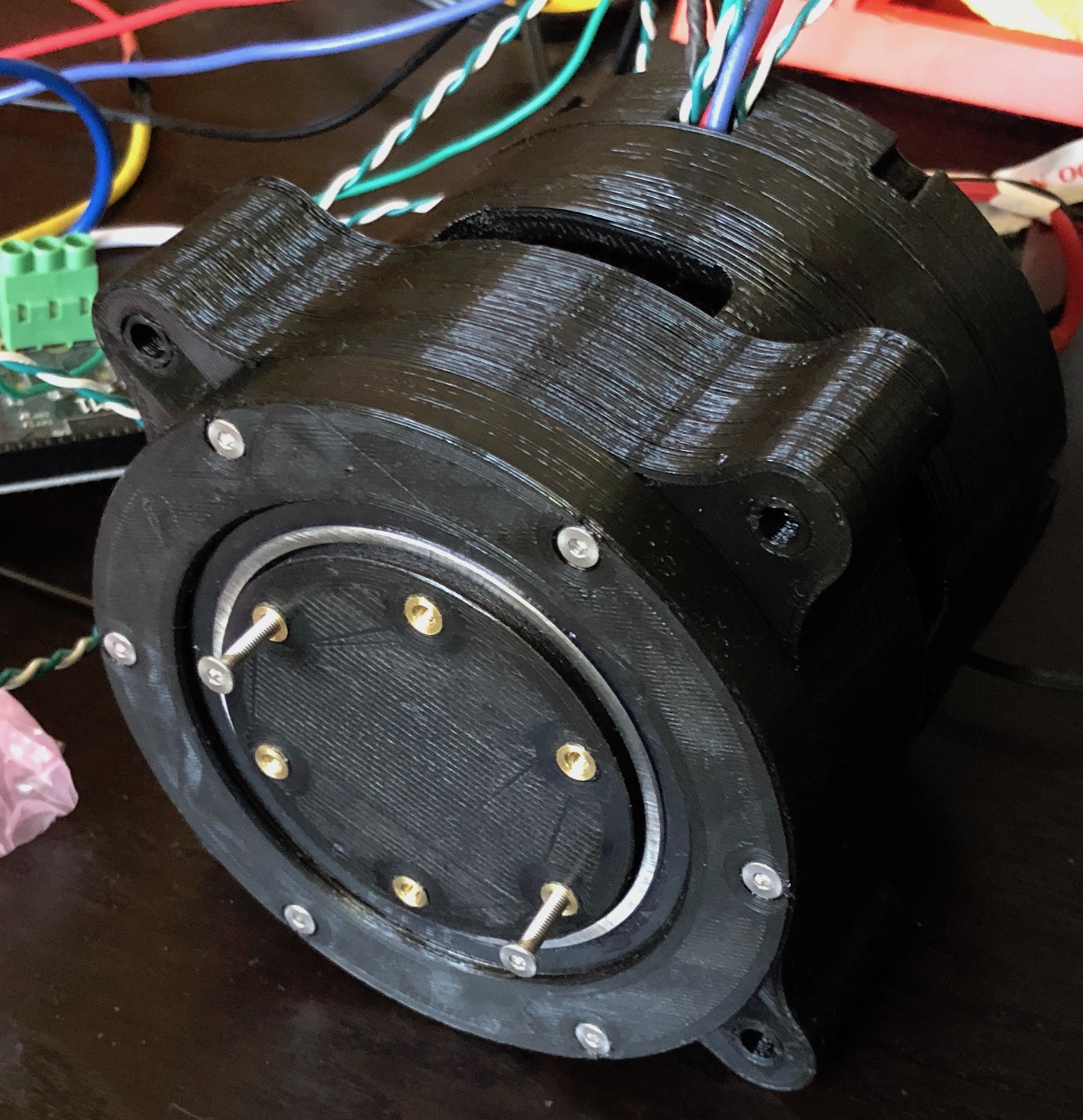
Finished printing everything out and assembled it. Now it’s time to run some tests.
I’m going to put a thermistor in the windings and see how much current it can take before overheating. I think it can plausibly take 120 amps of peak current thanks to the cooling fan.
Is it safe to put 120 amps through the MOSFETs? I assume I should put a cooling fan on the board, too.
I think 120 should be safe for short bursts. You need to turn up the motor.config.requested_current_range to 120A for the current sense amplifier gain range to let you go that high.
Yes put a fan to the board and keep an eye on the fet temps. Do you have a thermal camera?
Hi, I am doing electronics and firmware for the same purpose. I have done something like this before, a single stage 1/4-1/5 gear ration cyclic reduction, and later some timing belt based harmonic reduction. Now I hope to join you with your project as Open source development in electronics.
What’s involved in making it work with ROS? I’m going to make a physics model for use in OpenAI/Mujoco reinforcement learning, and I think you could easily import that model into ROS.
This seems like an great fun project! Great work @g-levine
Just got 10pcs of the Turnigy Multistar 9235-100KV and have started printing the parts for the Actuators