Hey Guys,
Just setting up the ODrive with a Hoverboard motor. Walking through the guide on the website is simple, but I’m noticing a few issues I’m running into.
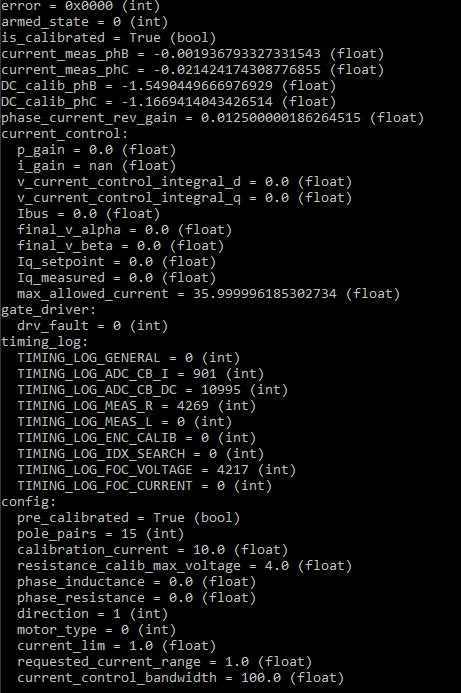
First…The Phase Inductance and Resistance are 0. I’ve checked the connections as well as opened up the motor to check the number of magnetic poles. No error though.
Also, when I do the same for the encoder, I’m getting an offset_float of 0. Once again, no error. (New User, can’t post another image)
Just for the heck of it I still moved on in the guide and tried spinning the motors…nothing.
I don’t have the 22nF caps added yet, they’re currently on order. As far as setup, I’m using a 24V 1A power supply just for initial testing until I get the power pack I bought setup. Any ideas what might be causing these issues?
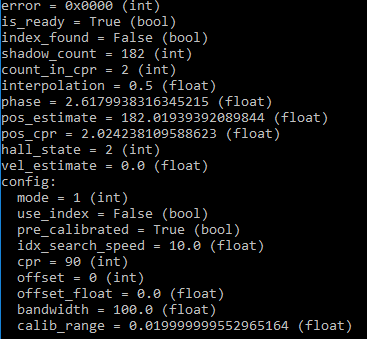
Here’s the other photo.
After some troubleshooting I managed to get the phase inductance and resistance. The encoder calibration still isn’t working but I’m guessing it’s due to the lack of 22nF caps. I’m going to try a larger power supply and adding the caps to see if it helps.
I am having the same issue. How did u solve it
Hey! I’m the same guy who made the thread. I got it working by soldering on the 22uF caps. You just have to be careful and make sure there’s no shorts between them when you solder it on. The 22uF caps should go between each phase and ground.
Be careful, I think the recommendation is 22nF. 22uF is probably 1000x too big.
Yup you’re right, misread/mistype on my part. Haven’t worked the modification in 2 years so my memory’s a bit spotty. Thanks for catching that