Hi!
I am a newbie, my first odrive setup has 12 inch long - 1/4" diameter steel rod attached with 5065 and 0.5 lbs load at the other end of rod.
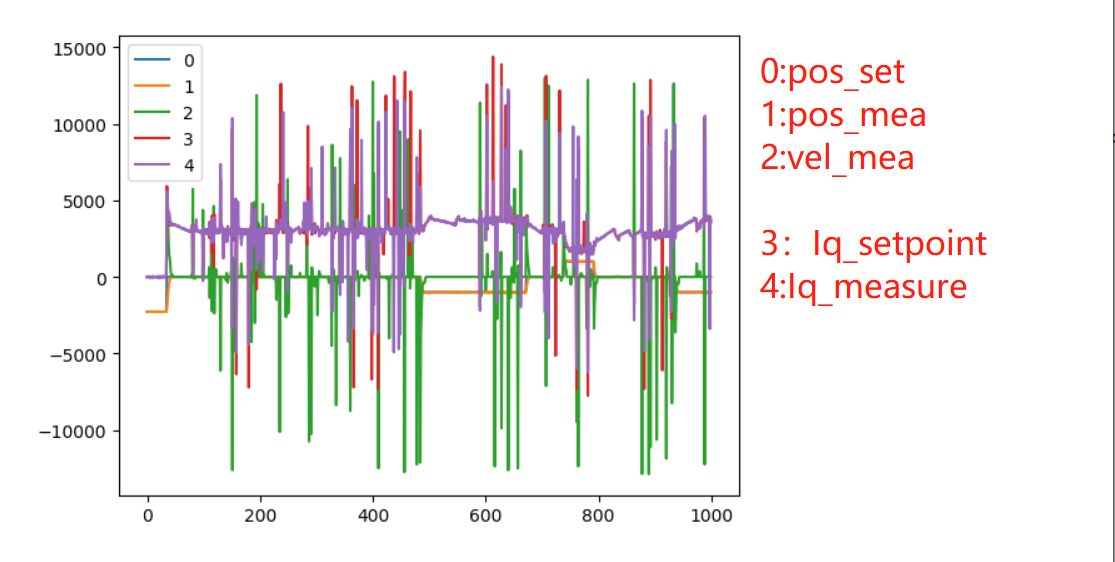
I am using pos_setpoint method to control rotation. Due to inertia, I see wide oscillations. How can I prevent these oscillations?
Thank you in advance,
A