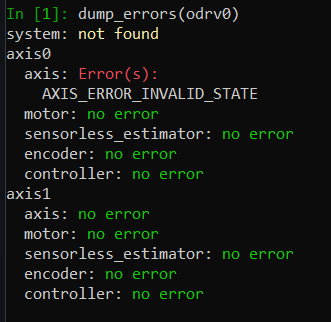
I’ve been having trouble with the motor on axis 0. I’ve been getting this error on the axis and I don’t know how to fix it?
invalid state means that you need to run calibration before you can go to closed loop control.
If you are using an absolute encoder (which, once it is first calibrated and configured, can go straight to closed loop control after a reboot) then maybe you forgot to set encoder.config.pre_calibrated=true after calibration.
I have it set to true but, I keep getting the error?
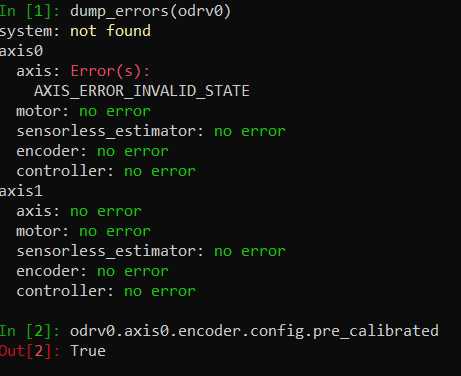
You still need to run the calibration though, and then save the config.
1 Like
Lifted the project with a jack and did a reboot.
Seems like a weight issue and something needing lubed