Hi
The motor I use does not have the speed like this video.
ODrive will in general drive to about 75% of base speed, so my 100kv motor on 24V would reach 1800 RPM.
Since I use the motor at reduced speed(Reduction ratio 1:8), the speed will be 225 PRM.
But the current speed is only about 20 RPM.
What is the max speed possible?
Thanks!
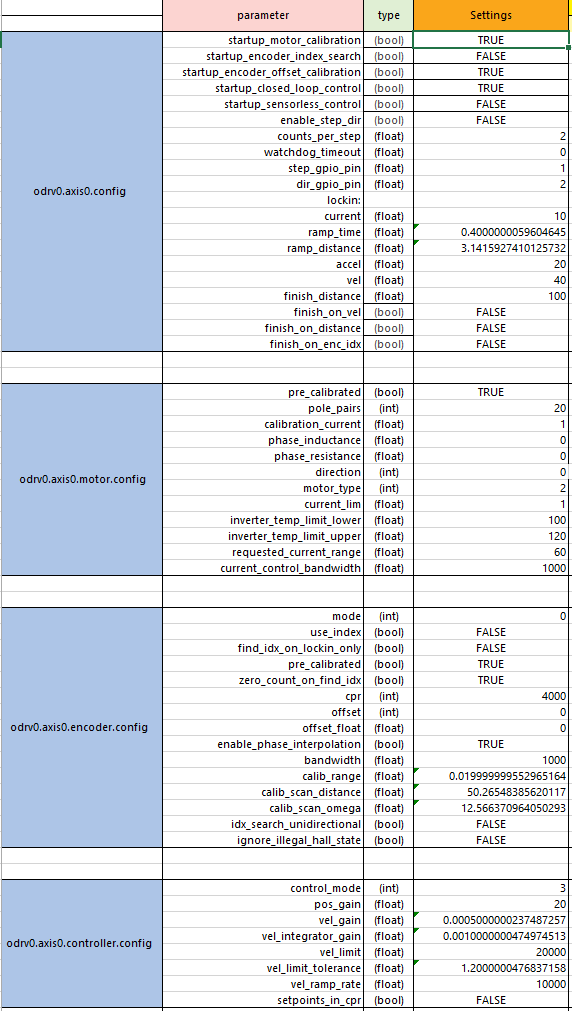
I set current_lim=3, so the current speed became about 60 RPM.
Because the vibration was large, I changed the following gains, pos_gain=30 vel_gain=0.0002 pos_gain=0.5*10*vel_gain
But when I set current_lim=4, the motor started and then stopped.
I got the following error. axis0 axis: Error(s): ERROR_DC_BUS_OVER_VOLTAGE
What parameters should I change?
What is your power source? Can it supply current more than 4A?
Power wires and connections can be source of problem. More current makes more voltage drop on wires and connections
I use gimbal motor.
According to the website, current_lim is 4V, not 4A?
Note: When using gimbal motors,current_limandcalibration_currentactually mean “voltage limit” and “calibration voltage”, since we don’t use current feedback. This means that if you set it to 10, it means 10V, despite the name of the parameter.
I was wondering If you we’re able to get any progress on this?
I’m having the same problem with my motors. Due to the high resistance of my coils I could only get it to work in gimbal mode (Getting started - Motor error 64).
All seems to be working fine but also at a max speed of around 60rpm, even though my motors are rated for 3000rpm.
Hi JasperJ
I had made mistake.
I had used “gimbal motor mode”, but I should have used “high current motor mode”.
Using correct mode, you will get beep.
Yes indeed, these are the motors I’m using. Can’t seem to find any more specs for them though… Tamagawa 3275N125E21 TBL-T and
Tamagawa 3273N126E21 TBL-T
I salvaged them out one of these.
I was hoping the 48V ODrive would be suitable. Would a last resort option be to swap out the MOSFETs on the Odrive? Had something like these in mind as they should be pin compatible.