HiCTRL_MODE_CURRENT_CONTROL,
setpoint is commanded current value.
The settings are as follows:
odrv0.axis0.controller.config.pos_gain = 35
odrv0.axis0.controller.config.vel_gain = 0.000325
odrv0.axis0.controller.config.vel_integrator_gain = 0.00075
odrv0.axis0.motor.config.current_lim = 50
odrv0.axis0.motor.config.calibration_current = 20
odrv0.axis0.motor.config.requested_current_range = 20
odrv0.axis0.motor.config.resistance_calib_max_voltage = 5
odrv0.axis0.controller.config.vel_limit = 120000.0
If this setting is used, can the current flow up to 50A ?
mike
November 21, 2019, 12:16am
2
Why is requested_current_range set to 20? The default is 60; according to the odrive docs, you raise this to 90 if your current_lim exceeds 60, but there’s no indication about why you would drop the value to 20 and what effect (if any) that has. That said, since you’re experiencing issues around current, it seems to me that your requested_current_range setting might be the problem.
1 Like
I raised it to 60A .
Increasing to 80A worked well !ERROR_CURRENT_UNSTABLE .
In addition, the other motor increased the odrv0.axis0.motor.config.requested_current_range to 80A , but no current was flowing to the target value.
What should I do ?
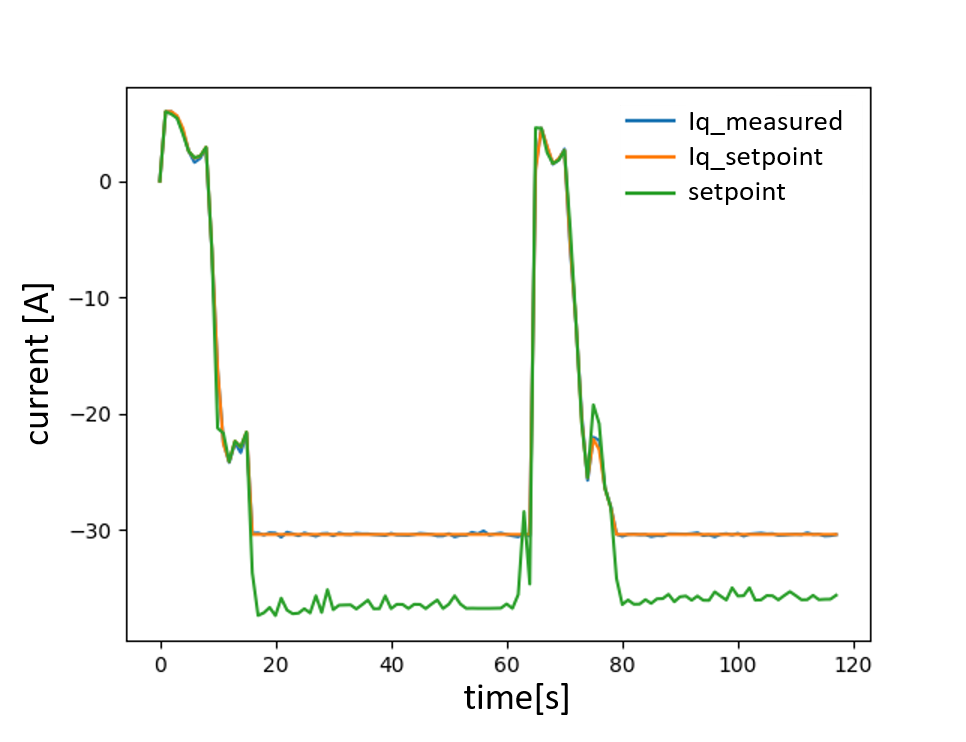
You’re requesting -50A but only getting -30A?
Yes.odrv0.axis0.controller.current_setpoint = -40, but I got -30A.
vel_gain = 0.000325
vel_integrator_gain = 0.00075
Are these too small ?CTRL_MODE_CURRENT_CONTROL?
Riewert
November 23, 2019, 8:59pm
8
This is probably not the issue, but It might be scaling back because it is too warm. Can you check the temperatures just to be sure? Or just check if the behaviour is the same after it has had time to cool down.
1 Like
Oh, thanks !
Riewert
November 25, 2019, 7:38pm
10
True, it is probably not your issue, but just to be clear for future readers I’ll explain what happens.
When the odrive gets too warm, because you are demanding high currents (>15A continuous is my guess) for an extended amount of time and insufficient/no cooling, the software starts to limit the amount of current it will allow.
Also, look through odrv0.axis0.motor.current_control. It has a number of values that might help.
Thanks to your advice, I understand the reason for the restriction.max_allowed_current = 30.375 is the cause.
In [1]: odrv0.axis0.motor.current_control
Out[1]:
p_gain = 0.024017401039600372 (float)
i_gain = 55.83380126953125 (float)
v_current_control_integral_d = 0.0 (float)
v_current_control_integral_q = 0.0 (float)
Ibus = 0.0 (float)
final_v_alpha = 0.0 (float)
final_v_beta = 0.0 (float)
Iq_setpoint = 0.0 (float)
Iq_measured = 0.0 (float)
Id_measured = 0.0 (float)
I_measured_report_filter_k = 1.0 (float)
max_allowed_current = 30.375 (float)
overcurrent_trip_level = 33.75 (float)
So, I tried changing its parameter, but I got the following result.
In [2]: odrv0.axis0.motor.current_control.max_allowed_current = 50
Exception Traceback (most recent call last)
~/.local/lib/python3.7/site-packages/fibre/shell.py in <module>
----> 1 odrv0.axis0.motor.current_control.max_allowed_current = 50
~/.local/lib/python3.7/site-packages/fibre/remote_object.py in _setattr_(self, name, value)
252 attr.set_value(value)
253 else:
--> 254 raise Exception("Cannot write to property {}".format(name))
255 elif not object._getattribute_(self, "_sealed_") or name in object._getattribute_(self, "_dict_"):
256 object._getattribute_(self, "_dict_")[name] = value
Exception: Cannot write to property max_allowed_current
towen
November 26, 2019, 7:29am
12
I think max_allowed_current and overcurrent_trip level are driven bymotor.config.current_lim andmotor.config.current_lim_tolerance
I set motor.config.current_lim = 58 and motor.config.current_lim_tolerance = 1.25.max_allowed_current = 30.375?
towen
November 26, 2019, 8:16am
14
Not sure…
It’s 60.max_allowed_current = 30.375.
max_allowed_current is determined by odrv.config.shunt_conductance and odrv.axis.motor.config.requested_current_range. Please check these values.
Where is it ?
error = 0x0000 (int)
armed_state = 0 (int)
is_calibrated = True (bool)
current_meas_phB = 0.1105949878692627 (float)
current_meas_phC = 0.05519634485244751 (float)
DC_calib_phB = 0.27191853523254395 (float)
DC_calib_phC = -0.5587559938430786 (float)
phase_current_rev_gain = 0.012500000186264515 (float)
thermal_current_lim = 272.60174560546875 (float)
get_inverter_temp()
current_control:
p_gain = 0.02397913858294487 (float)
i_gain = 48.26555252075195 (float)
v_current_control_integral_d = 0.0 (float)
v_current_control_integral_q = 0.0 (float)
Ibus = 0.0 (float)
final_v_alpha = 0.0 (float)
final_v_beta = 0.0 (float)
Iq_setpoint = 0.0 (float)
Iq_measured = 0.0 (float)
Id_measured = 0.0 (float)
I_measured_report_filter_k = 1.0 (float)
max_allowed_current = 30.375 (float)
overcurrent_trip_level = 33.75 (float)
gate_driver:
drv_fault = 0 (int)
timing_log:
TIMING_LOG_GENERAL = 0 (int)
TIMING_LOG_ADC_CB_I = 2470 (int)
TIMING_LOG_ADC_CB_DC = 13038 (int)
TIMING_LOG_MEAS_R = 6658 (int)
TIMING_LOG_MEAS_L = 6666 (int)
TIMING_LOG_ENC_CALIB = 6982 (int)
TIMING_LOG_IDX_SEARCH = 0 (int)
TIMING_LOG_FOC_VOLTAGE = 6930 (int)
TIMING_LOG_FOC_CURRENT = 0 (int)
config:
pre_calibrated = True (bool)
pole_pairs = 20 (int)
calibration_current = 20.0 (float)
resistance_calib_max_voltage = 5.0 (float)
phase_inductance = 2.397913885943126e-05 (float)
phase_resistance = 0.048265550285577774 (float)
direction = -1 (int)
motor_type = 0 (int)
current_lim = 58.0 (float)
current_lim_tolerance = 1.25 (float)
inverter_temp_limit_lower = 100.0 (float)
inverter_temp_limit_upper = 120.0 (float)
requested_current_range = 90.0 (float)
current_control_bandwidth = 1000.0 (float)
I made seriously stupid mistake.
So I tried to save the configuration and reboot after changing requested_current_range .
Thanks a lot !!!
1 Like