Can you please walk me through the steps to pull and to update
Also, how did you compile the file?
Thanks
Can you please walk me through the steps to pull and to update
Also, how did you compile the file?
Thanks
Hi,
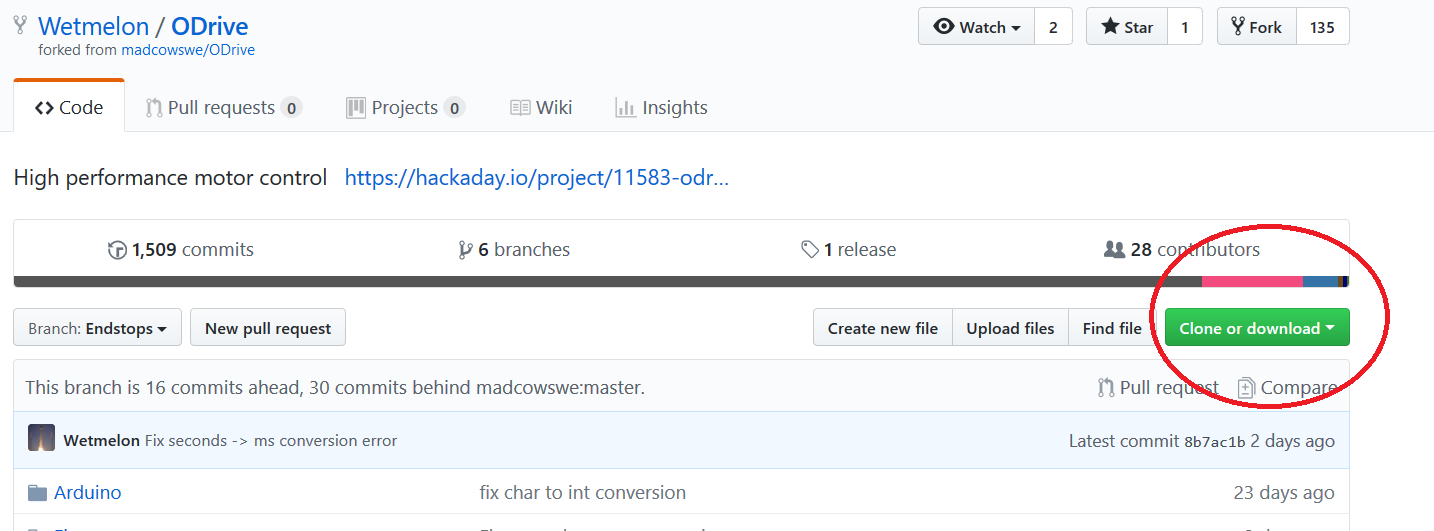
find the lates version here: https://github.com/Wetmelon/ODrive/tree/Endstops
Download the zip:
Unpack the zip to a location you like.
Open the ODrive_Workspace.code-workspace file with VSCode. (Windows environment)
If you don’t have a working development environment follow: https://docs.odriverobotics.com/developer-guide
Greetings / Zennix
Hello Wetmelon. I am ready to test the trajectory planner and End switches an interrupts ; however, I am a really confused with the the github stuff. Are those two features combined on the latest firmware Firmware version 0.4.3?
Also, after updating firmware to 0.4.3 I wasn’t able to set the settings below; there was no way to be found.
odrv0.axis0.trap_traj.config.vel_limit = Float
odrv0.axis0.trap_traj.config.accel_limit= Float
odrv0.axis0.trap_traj.config.decel_limit = Float, and
odrv0.axis0.controller.move_to_pos(Float)
Thanks.