Total Noob here, not a programmer… please forgive me!
I want to make a “lazy susan” table with a large gimbal motor under it to spin it to specific angles. The Odrive will receive input from an Frsky X8R drone receiver that outputs PWM servo signals.
I have already worked my way through the “Getting Started” section but was not able to get certain parts to work.
My Odrive board: 56 Volt Version 3.6, purchased in September 2020
My motor: T-motor G100 gimbal motor (I also tried 3 other motors)
My Encoder: 8192 CPR capacitive encoder from Odrive store
Battery hooked up to Odrive: 24 Volt
Things I have already done with Odrivetool:
Set current limit, Set cal current, set break resistance, set velocity limit, configured pole pairs, set encoder, and I set motor type to gimbal (Motor_TYPE_GIMBAL) Saved after all this.
Problem: In the “Getting started” everything is fine until I get to the part where I type :
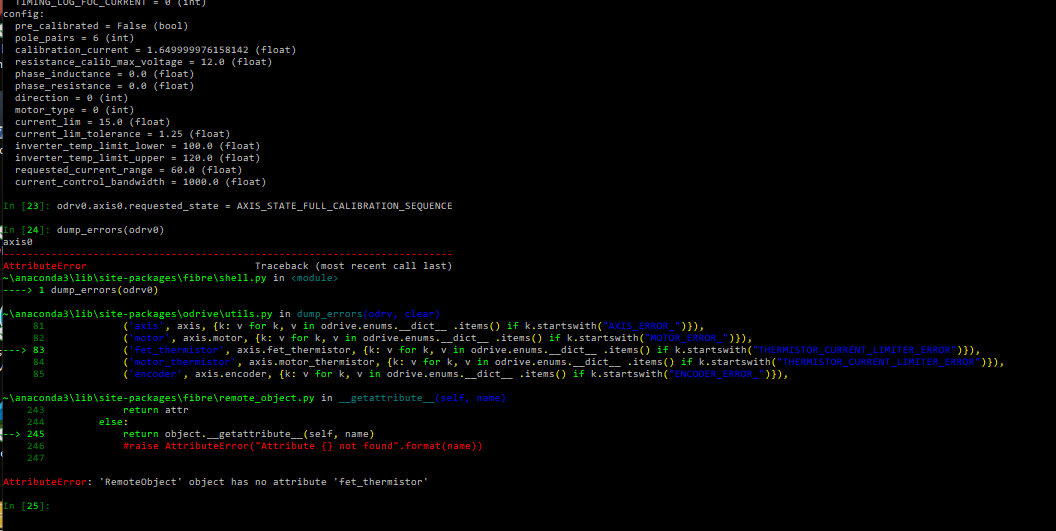
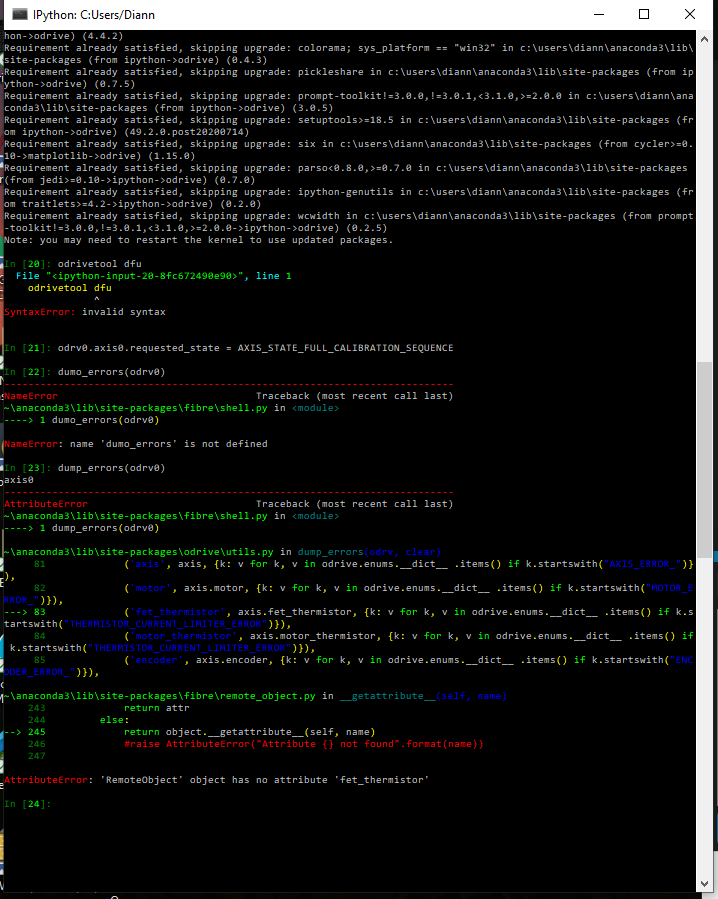
odrv0.axis0.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
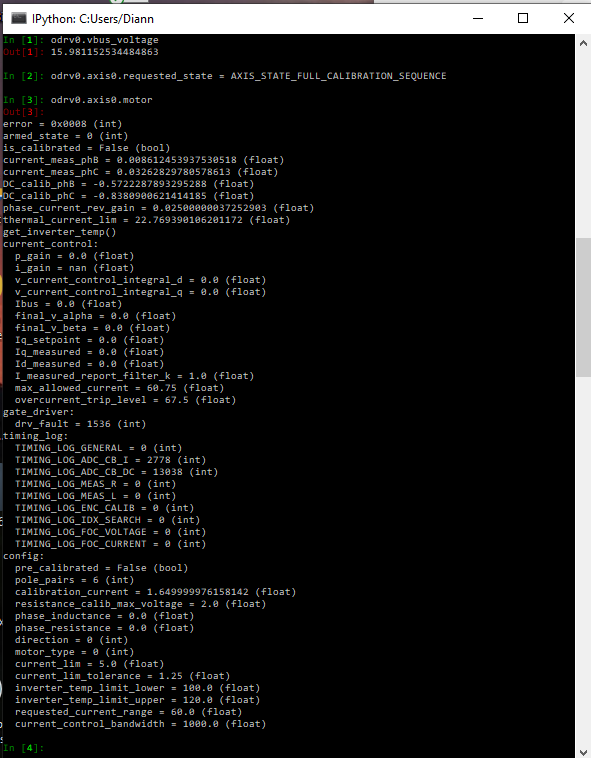
This should start the calibration sequence, but nothing happens, not even a beep. I then wanted to see if it was the motor, so I switched out for multiple other motors. None did anything. I checked the voltage going to the board using “odrv0.vbus_voltage” and the voltage reads fine, exactly the battery voltage.
What do you think is wrong?
Thank you to anyone who can help me