Probably too much detail, but not sure what’s relevant and what not…
I just got received a D5065 motor from the ODrive store a few days ago. Hooked it up to a clone single drive 3.5-48V drive with 48V SMPS and CUI encoder. I know, bad to buy the clone, but I don’t have space or use for the second axis - I would buy the official single drive if there were one, for reasons that may become clear.
Unfortunately, I forgot to order the connector for the encoder, and it took 7 days to get to me, so I messed with sensorless mode in the meantime. The motor did turn, possibly at the wrong speed. The ODrive seemed to be operational, though some oddities which I think were due to my misunderstanding about FW versions.
I got the connector for the encoder, hooked it up , reconfigured the ODrive and got an error ERROR_CPR_POLEPAIRS_MISMATCH and a high-pitched noise when calibrating. I checked the encoder DIP switch and the config settings: 8192 CPR and 7 pole pairs, which I think is right. At any rate, one turn of the motor shaft altered the encoder count by about 8192 counts. Wiring and grounding seems OK. I found the problem was in the encoder offset part of the full calibration, the earlier steps worked OK.
I couldn’t get much help online, and came to realize the clone FW it came with was not current, so decided to update it in the hopes that might get me somewhere. I ran odrivetool dfu in Linux and it seemed to “take”, but now the drive was stuck in initialization, I think. The requested state was 2 and the current state was 0, and none of the calibration commands worked, and the encoder counts didn’t increment.
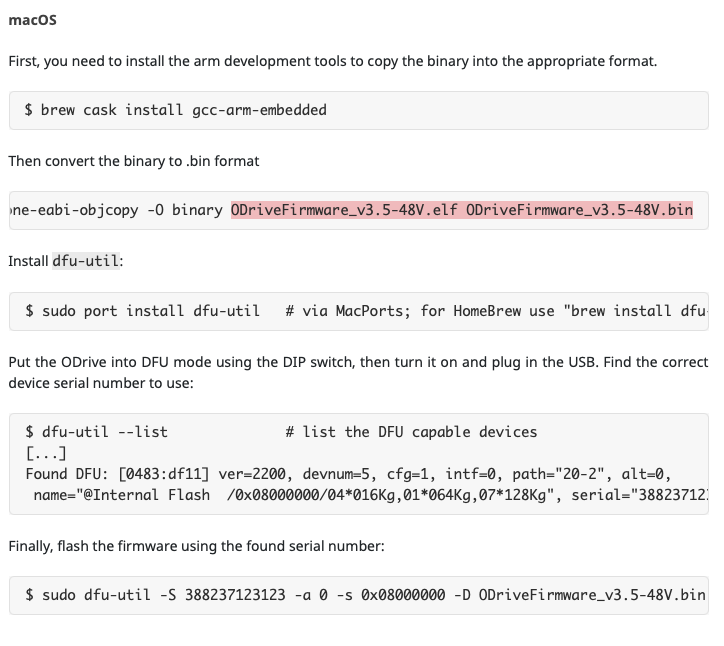
I retried this process a few times, including in Windows/anaconda, and it’s all a bit of a blur, but at some point I think I uploaded the wrong firmware version (3.6 possibly), or something else happened and the board does not have a version loaded (make write_otp is suggested) and the USB interface did not work (except the bootloader when I flip the DFU DIP switch). So I tried using dfu_util and that succeeded with the correct 3.5-48V version. However, still no USB interface, and odrivetool dfu still tells me the version is not loaded in the board. I am assuming my earlier DFU activities have munged up the OTP, and from the github comments it looks like there is no way I can get it back to a decent value, even if I knew how ( I haven’t found any noob-level instructions for this).
So is there some means to resurrect or at least make use of an ODrive that has a bad version in the OTP? Other than replacing the chip. And even if that is fixed, any ideas on getting the USB interface to work again?