Hi, i’m working on an Odrive Pro version and i try to control the velocity of a motor.
The motor I used is a BLDC motor with an Hall effect encoder. I connected the pins of the encoder on the ODrive Pro and the Motor phases but i have troubles with an illegal_hall_state error after encoder polarity callibration :
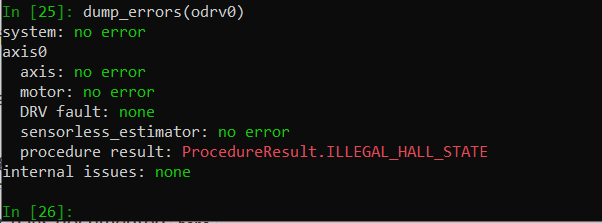
Also this motor was working correctly on the axes1 on the normal Odrive but result on an illegal_hall_state_error on axes0.
I read some topics on this type of errors but I don’t look one of that on the Odrive Pro. Thank you in advance for your response.
1 Like
I changed it to True by the commandline :
odrv0.hall_encoder0.config.ignore_illegal_hall_state = True
odrv0.save_configuration()
odrv0.reboot()
I also tried to change encoder1 to True, but I have the same error.
And when I start the closed control loop state, a motor error appears :
MotorError.UNKNOWN_PHASE_ESTIMATE
UKNOWN_PHASE_ESTIMATE means you haven’t done the encoder offset calibration yet.
I did it before requested the closed loop control and it runs with success, but I still have this error when I start the closed loop control.
I have the same issue as you. When I run my motor with an AMT102 it is just fine but when I use the hall encoder of the motor, I get this error(MotorError.UNKNOWN_PHASE_ESTIMATE).
I have done the ENCODER_INDEX_SEARCH and the ENCODER_OFFSET_CALIBRATION.
Same as you, the error shows when I request the closed loop control state.
Did you resolve your problem? Let us know what you did ! Please!!!
No, I didn’t resolve the problem.