Hello everyone,
I’m sorry, I’m using a translator for English communication, please excuse me if the sentences are not correct.
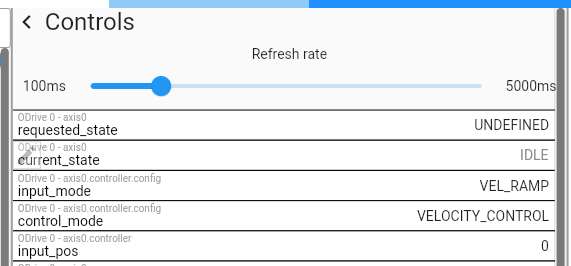
I’m using an odrive S1 to drive a hoverboard motor. It seems to be working fine, but sometimes (I haven’t figured out why yet?) the INPUT_MODE parameter changes from VEL_RAMP to PASSTHROUGH.
Because of this, the odrive goes into BRAKE_RESISTOR_DISARMED when the speed setpoint increases significantly.
Could you tell me why or, if not, what other parameters might be influencing this?
Thanks.
Damien
bonjour à tous,
J’utilise un odrive S1 pour piloter un moteur d’hoverboard. le fonctionnement semble bon, mais par moment (je n’ai pas encore trouver pourquoi ?) le paramètre INPUT_MODE change de VEL_RAMP et passe à PASSTHROUGH.
A cause de cela, l’odrive ce met en défaut BRAKE_RESISTOR_DISARMED sur de grosse augmentation de consigne de vitesse.
Pourriez vous m’indiquer pourquoi ou à défaut quels seraient les autres paramètres d’influences ?
Hello,
Indeed, I’m using a PC via CAN to manage the two odrives.
I used the “can_simple_utils.py” program on GITHUB to run the index search with a PS3 controller.
After a fault in one of the odrives, I restarted the index search, and it seems that’s when the parameter changes state (but not every time).
I can’t find the cause of this random change.
I’m open to any ideas.
Have a nice day.
hello,
En effet, j’utilise un PC en CAN pour gérer les deux odrive.
je suis partie de la base du programme “can_simple_utils.py” sur GITHUB pour lancer la recherche d’index avec une manette de PS3.
Après un défaut d’un des odrive, je relance la recherche d’index et il semble que se soit a ce moment que le paramètre change d’état (mais pas à chaque fois).
Je ne parviens pas à trouver l’origine de ce changement aléatoire.
Je suis à l’écoute pour des idées.
Bonne journée